




 广告
广告





















































DLO:用于2.5D室外环境的直接法LiDAR里程计
2018-08-21 09:45:21· 来源:同济智能汽车研究所

本论文由孙路,赵君峤(指导教师),贺旭东,叶晨根据直接法Lidar里程计的研究成果撰写完成,本论文创新提出了一种基于2.5D激光地图的直接法里程计,算法具有很高的精确性和实时性。
本文译自《The 2018 IEEE Intelligent Vehicles Symposium》
所收录文章《DLO: Direct LiDAR Odometry for 2.5D OutdoorEnvironment》
原作者:孙路,赵君峤,贺旭东,叶晨
本论文由孙路,赵君峤(指导教师),贺旭东,叶晨根据直接法Lidar里程计的研究成果撰写完成,本论文创新提出了一种基于2.5D激光地图的直接法里程计,算法具有很高的精确性和实时性。
摘要:对于无人驾驶汽车而言,高精度实时定位是稳定驾驶的保证。与视觉里程(VO)相比,LiDAR里程法(LO)具有更高的精度和更好的稳定性。然而,2D LO仅适用于室内环境,并且3D LO一般效率较低。两者都不适合在室外驾驶环境中无人驾驶车辆的在线定位。本文提出了一种基于2.5D激光地图的直接法LO。在VO中提出的快速半稠密直接法被用来配准两帧2.5D激光地图。实验表明,该方法在室外环境中优于3D NDT和LOAM。
一、引言
在没有全球导航卫星系统的情况下,无人驾驶汽车必须能够通过传感器对环境的感知来对自己实现定位。SLAM算法通过在驾驶期间观察环境地标来构建地图,并且实时地将当前的感知信息与地图相关联,最佳的估计自己的位姿。
在SLAM系统中,前端里程计是重要的组成部分,它通过逐帧之间的匹配来估计相对的位姿变换,从而实现航位推算。视觉里程(VO)主要的方法可以分为间接和直接法。间接方法依赖于从图像中提取的特征,例如ORB-SLAM中采用的ORB特征。然后通过特征的匹配来计算随后的关键帧之间的变换。直接法,如LSD-SLAM,基于两个图像之间的光度误差的最小化直接估计关键帧之间的变换,因此比间接法更快,而且在包含很少特征的“弱纹理”场景中更鲁棒。
由于LiDAR传感器的高精度特点,LO方法比一般视觉方法更加鲁棒和精确。现有的LO方法可以根据所涉及的测量的空间维度进行分类。2D LO方法使用二维占用网格图(OGM),基于梯度下降的扫描匹配方法来估计传感器的运动。基于这些方法的实用系统有GMapping,Hector SLAM和Cartographer等。然而,2D OGM对于室外环境的表达不足。3DLO方法使用多线激光雷达传感器,通过点云或3D OGM的匹配或通过匹配从点云提取的3D特征来估计传感器的运动。
3D LO方法可以应用于室内和室外环境。然而,点云配准或3D空间中的OGM匹配所需的计算使得这些方法计算代价高昂,实时性差。
本文提出了一种基于2.5D激光地图的LO方法,用于室外环境中的无人驾驶定位。主要贡献是使用源自VO的半稠密直接法来实现对2.5D表示激光地图的快速且准确的配准。首先,建立2.5D激光地图,其中每个单元格保存高度期望值。然后,选择具有高梯度的单元格,并且使用Gauss-Newton方法基于两个2.5D激光地图的高度差误差(HDE)来优化匹配目标函数。
二、方法
A. 2.5激光地图
2.5D激光地图是对激光雷达扫描范围的格网表达,其中每个格网单元记录了其中点云统计的高度均值。这种表示方法可以进一步拓展到利用高斯或基于混合高斯的2.5D激光地图,在我们的实验中发现这种简单的表示同样是有效的。图1是2.5D激光地图的示例。
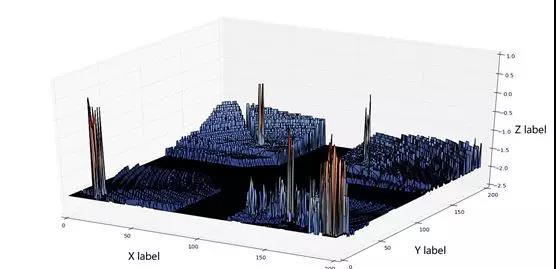
图1 2.5D栅格地图示例
点云数据首先进行2D栅格化,然后将点云投影到2D网格图上。这里我们用C来表示点云的投影过程, 网格图中点
网格图中点
的坐标:
其中:
其中fx,fy是网格图x和y轴的分辨率,cx,cy是网格图的中心,它们是行数和列数的一半。网格图如图2(a)所示。对于每个网络,我们保持网格中所有点的高度z。然后均值μ用于表示每个网格的高度期望,其中n是 的点数:
的点数:

图2 栅格地图:(a) lidar点云投影到栅格中 (b) 在较高梯度的栅格中用绿色表示
B.配准
我们使用Gauss-Newton方法求解两个2.5D激光地图的转移矩阵,最小化两个网格图之间的HDE。目标函数J是
其中 和
和 代表网格p中的高度平均值,R是旋转矩阵,t是平移向量。我们使用李代数ξ表示位姿,实现求导:
代表网格p中的高度平均值,R是旋转矩阵,t是平移向量。我们使用李代数ξ表示位姿,实现求导:
目标函数变为:
HDE ei的模型如下:
使用Gauss-Newton方法,我们需要计算雅可比矩阵Ji,它是HDE ei关于自变量ξ的导数:
假设:.png)
因为ei关于ξ的导数不能直接计算,根据链式求导规则,Ji可以分为三个部分:
从左到右:δu2/δg是对网格的偏导数,即是网格梯度,δg/δq是栅格3D空间下对点的偏导数,δq/δξ表示在三维空间中点对李代数的偏导数。
Gauss-Newton方法最终计算为:
通过帧间的连续配准来计算无人驾驶车辆的位置,这被称为直接法LiDAR里程(DLO)。
三、实验
我们使用KITTI数据集和由TiEV无人车(如图3所示)采集的数据集来验证算法。

图3 TiEV无人驾驶车
在这些实验中,2.5D激光地图的大小为400×400,每个网格为10cm×10cm。然后将算法中的参数设置为:
我们使用的计算平台为Core i5 4200U处理器和8GB内存。操作系统是Ubuntu 14.04。
A.KITTI数据集
我们使用纯点云数据来测试所提出的方法并将其与真值进行比较。我们还使用3D-NDT和LOAM的实现进行比较。由于DLO不使用IMU的信息,因此我们运行没有IMU数据的LOAM程序。
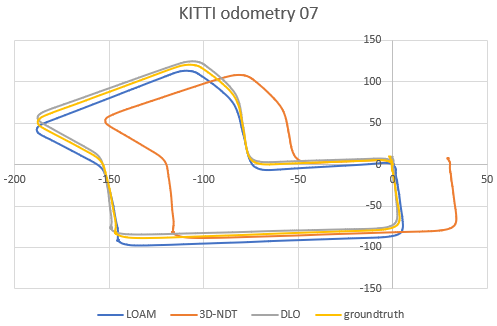
图4 DLO,3D-NDT,没有IMU的LOAM以及KITTI 07数据集的真值轨迹比较

图5 DLO,3D-NDT,无IMU的LOAM在KITTI里程07数据集上的相对误差比较
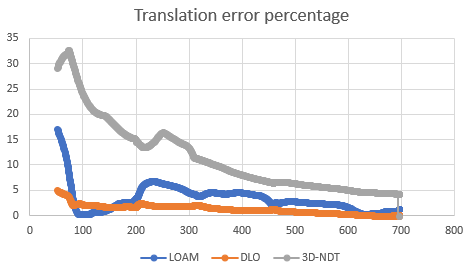
图6 DLO,3D-NDT,无IMU的LOAM在KITTI里程07数据集上相对误差
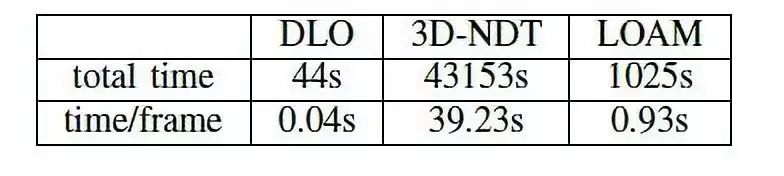
表1显示了数据集的三种方法的运行时间。它表明DLO比3D NDT和LOAM更高效。3D NDT使用所有点云信息进行扫描匹配,并优化目标函数直至收敛,计算代价巨大。LOAM中,前端和建图的最终频率为1hz,而单纯采用前端无法得到正确的推算结果。
表1 DLO,3D-NDT以及LOAM的运行时间
我们也进行了不同栅格大小的实验。根据图7,可见栅格大小对结果存在较小影响,针对室外场景设置为10cm较好。
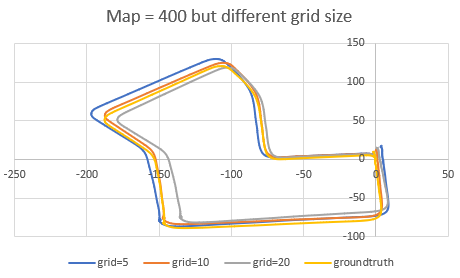
图7 基于DLO的不同栅格大小的实验结果
B.同济大学数据集
我们进一步利用无人车在同济大学嘉定校区采集数据测试了DLO。实验路线如图8所示。这是一条封闭的室外路线,总长度约为1.3km,其中包括约60°,90°,120°和270°的变化角度的转弯。此数据集包含超过2000帧。其中,LOAM在道路周围缺少建筑物的场景中出现了较大的角度漂移,而DLO则能够得到较好的轨迹(如图9)。

图8 嘉定数据集中的实验路径

图9 DLO和无IMU的LOAM在嘉定数据集上的轨迹比较
四、结论
在本文中,提出了一种基于2.5D激光地图的DLO方法。该方法高效且适用于户外环境。首先将扫描帧的点云投影到2.5D激光地图上,然后使用直接法进行配准。使用KITTI数据集和我们采集的数据集进行的实验表明:DLO在准确性和效率方面均优于3D-NDT。与LOAM相比,DLO不依赖于点云提取的特征,因此在无结构场景中配准的精度明显更高。这种方法的一个可能的改进是采用高度分布而不是高度期望,这将在我们未来的工作中探索。
所收录文章《DLO: Direct LiDAR Odometry for 2.5D OutdoorEnvironment》
原作者:孙路,赵君峤,贺旭东,叶晨
本论文由孙路,赵君峤(指导教师),贺旭东,叶晨根据直接法Lidar里程计的研究成果撰写完成,本论文创新提出了一种基于2.5D激光地图的直接法里程计,算法具有很高的精确性和实时性。
摘要:对于无人驾驶汽车而言,高精度实时定位是稳定驾驶的保证。与视觉里程(VO)相比,LiDAR里程法(LO)具有更高的精度和更好的稳定性。然而,2D LO仅适用于室内环境,并且3D LO一般效率较低。两者都不适合在室外驾驶环境中无人驾驶车辆的在线定位。本文提出了一种基于2.5D激光地图的直接法LO。在VO中提出的快速半稠密直接法被用来配准两帧2.5D激光地图。实验表明,该方法在室外环境中优于3D NDT和LOAM。
一、引言
在没有全球导航卫星系统的情况下,无人驾驶汽车必须能够通过传感器对环境的感知来对自己实现定位。SLAM算法通过在驾驶期间观察环境地标来构建地图,并且实时地将当前的感知信息与地图相关联,最佳的估计自己的位姿。
在SLAM系统中,前端里程计是重要的组成部分,它通过逐帧之间的匹配来估计相对的位姿变换,从而实现航位推算。视觉里程(VO)主要的方法可以分为间接和直接法。间接方法依赖于从图像中提取的特征,例如ORB-SLAM中采用的ORB特征。然后通过特征的匹配来计算随后的关键帧之间的变换。直接法,如LSD-SLAM,基于两个图像之间的光度误差的最小化直接估计关键帧之间的变换,因此比间接法更快,而且在包含很少特征的“弱纹理”场景中更鲁棒。
由于LiDAR传感器的高精度特点,LO方法比一般视觉方法更加鲁棒和精确。现有的LO方法可以根据所涉及的测量的空间维度进行分类。2D LO方法使用二维占用网格图(OGM),基于梯度下降的扫描匹配方法来估计传感器的运动。基于这些方法的实用系统有GMapping,Hector SLAM和Cartographer等。然而,2D OGM对于室外环境的表达不足。3DLO方法使用多线激光雷达传感器,通过点云或3D OGM的匹配或通过匹配从点云提取的3D特征来估计传感器的运动。
3D LO方法可以应用于室内和室外环境。然而,点云配准或3D空间中的OGM匹配所需的计算使得这些方法计算代价高昂,实时性差。
本文提出了一种基于2.5D激光地图的LO方法,用于室外环境中的无人驾驶定位。主要贡献是使用源自VO的半稠密直接法来实现对2.5D表示激光地图的快速且准确的配准。首先,建立2.5D激光地图,其中每个单元格保存高度期望值。然后,选择具有高梯度的单元格,并且使用Gauss-Newton方法基于两个2.5D激光地图的高度差误差(HDE)来优化匹配目标函数。
二、方法
A. 2.5激光地图
2.5D激光地图是对激光雷达扫描范围的格网表达,其中每个格网单元记录了其中点云统计的高度均值。这种表示方法可以进一步拓展到利用高斯或基于混合高斯的2.5D激光地图,在我们的实验中发现这种简单的表示同样是有效的。图1是2.5D激光地图的示例。
图1 2.5D栅格地图示例
点云数据首先进行2D栅格化,然后将点云投影到2D网格图上。这里我们用C来表示点云的投影过程,
网格图中点的坐标:
其中:
其中fx,fy是网格图x和y轴的分辨率,cx,cy是网格图的中心,它们是行数和列数的一半。网格图如图2(a)所示。对于每个网络,我们保持网格中所有点的高度z。然后均值μ用于表示每个网格的高度期望,其中n是
的点数:图2 栅格地图:(a) lidar点云投影到栅格中 (b) 在较高梯度的栅格中用绿色表示
B.配准
我们使用Gauss-Newton方法求解两个2.5D激光地图的转移矩阵,最小化两个网格图之间的HDE。目标函数J是
其中
和代表网格p中的高度平均值,R是旋转矩阵,t是平移向量。我们使用李代数ξ表示位姿,实现求导:目标函数变为:
HDE ei的模型如下:
使用Gauss-Newton方法,我们需要计算雅可比矩阵Ji,它是HDE ei关于自变量ξ的导数:
假设:
因为ei关于ξ的导数不能直接计算,根据链式求导规则,Ji可以分为三个部分:
从左到右:δu2/δg是对网格的偏导数,即是网格梯度,δg/δq是栅格3D空间下对点的偏导数,δq/δξ表示在三维空间中点对李代数的偏导数。
Gauss-Newton方法最终计算为:
通过帧间的连续配准来计算无人驾驶车辆的位置,这被称为直接法LiDAR里程(DLO)。
三、实验
我们使用KITTI数据集和由TiEV无人车(如图3所示)采集的数据集来验证算法。
图3 TiEV无人驾驶车
在这些实验中,2.5D激光地图的大小为400×400,每个网格为10cm×10cm。然后将算法中的参数设置为:
我们使用的计算平台为Core i5 4200U处理器和8GB内存。操作系统是Ubuntu 14.04。
A.KITTI数据集
我们使用纯点云数据来测试所提出的方法并将其与真值进行比较。我们还使用3D-NDT和LOAM的实现进行比较。由于DLO不使用IMU的信息,因此我们运行没有IMU数据的LOAM程序。
图4 DLO,3D-NDT,没有IMU的LOAM以及KITTI 07数据集的真值轨迹比较
图5 DLO,3D-NDT,无IMU的LOAM在KITTI里程07数据集上的相对误差比较
图6 DLO,3D-NDT,无IMU的LOAM在KITTI里程07数据集上相对误差
表1显示了数据集的三种方法的运行时间。它表明DLO比3D NDT和LOAM更高效。3D NDT使用所有点云信息进行扫描匹配,并优化目标函数直至收敛,计算代价巨大。LOAM中,前端和建图的最终频率为1hz,而单纯采用前端无法得到正确的推算结果。
表1 DLO,3D-NDT以及LOAM的运行时间
我们也进行了不同栅格大小的实验。根据图7,可见栅格大小对结果存在较小影响,针对室外场景设置为10cm较好。
图7 基于DLO的不同栅格大小的实验结果
B.同济大学数据集
我们进一步利用无人车在同济大学嘉定校区采集数据测试了DLO。实验路线如图8所示。这是一条封闭的室外路线,总长度约为1.3km,其中包括约60°,90°,120°和270°的变化角度的转弯。此数据集包含超过2000帧。其中,LOAM在道路周围缺少建筑物的场景中出现了较大的角度漂移,而DLO则能够得到较好的轨迹(如图9)。
图8 嘉定数据集中的实验路径
图9 DLO和无IMU的LOAM在嘉定数据集上的轨迹比较
四、结论
在本文中,提出了一种基于2.5D激光地图的DLO方法。该方法高效且适用于户外环境。首先将扫描帧的点云投影到2.5D激光地图上,然后使用直接法进行配准。使用KITTI数据集和我们采集的数据集进行的实验表明:DLO在准确性和效率方面均优于3D-NDT。与LOAM相比,DLO不依赖于点云提取的特征,因此在无结构场景中配准的精度明显更高。这种方法的一个可能的改进是采用高度分布而不是高度期望,这将在我们未来的工作中探索。







最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
