




 广告
广告





















































SUV电动后驱技术可行性研究
2018-08-27 11:26:57· 来源:驱动视界

前提:前置前驱SUV,欲通过后轮增加电驱实现四驱和混动。
前提:前置前驱SUV,欲通过后轮增加电驱实现四驱和混动。
后轮电驱的几个方案比较和选择:



混动构型的选择
后驱电机已经确定是P4构型,需要确定的是发电机的位置,现分析如下:

从上述分析可知,P0是较容易实现的方案,即P0+P4的构型,具体还请领导决策。
P0虽然容易实现,但是受限于BSG电机的功率,充电效率有限。
以传统燃油车为基础,通过增加后驱动电机的方式实现四驱,不但契合了新能源汽车的发展趋势,同时也是低成本、对整车原有架构改动较小、较容易实现的一种方式,这种布置能够实现前驱到四驱的切换,可以算是适时四驱的一种。
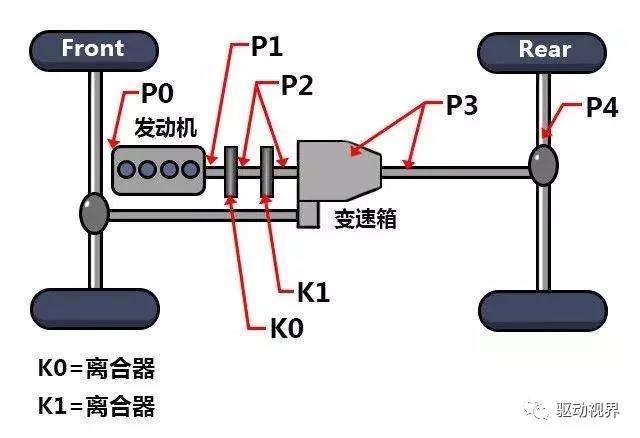
▲P0-P4构型详解,看不懂的同学自行找资料学习。
主流车型对标分析



注:沃尔沃用的是同轴电机

宝马 X1 25Le 的这套混动系统则由一台 1.5T 三缸涡轮增压发动机和一台电机组成,发动机布置在前轴用于驱动前轮,电机布置在后轴用于驱动后轮行驶,不过只有在特定模式下才能实现四驱行驶。

X1插混这套混动系统主要是依靠后桥电机驱动车辆,然后在车辆有必要时才启动发动机协同工作,通过降低发动机工作时间来达成低油耗的目标。
在 EV 模式,此时发动机不启动,电池给后轴上的电机供电,电机驱动后轮行驶,此时车辆处于后驱模式,这也符合宝马一贯以来的特性。
注意其电池和油箱的布置
在发动机驱动模式下,此时发动机启动一边驱动车辆行驶,一边给电池充电,此时后轴上的电机不工作,车辆变成前驱模式。
而在混动模式下,发动机和电机同时工作,分别驱动前轮和后轮行驶,此时车辆便变成了四驱模式。

欧蓝德 PHEV 在混动模式下行驶时,具有两种不同的工作模式。
一是通过发动机启动给电池组充电,前后电机驱动车辆前进;另一模式是在电池电量较低,但又需要较大动力输出时,发动机能代替前桥电机直接驱动前轮,后轮则由后桥电机继续驱动。.

三菱为欧蓝德 PHEV 配置的四轮驱动系统称为超级全轮控制(S-AWC)。
这套系统可通过主动后桥控制施加的制动力实现车轮间的扭矩的传输。与此同时,还能选择启用四驱锁止模式,模拟出中央锁止式差速器的效果,优化前后轮的扭矩分配,实现牵引力和转向反馈的平衡
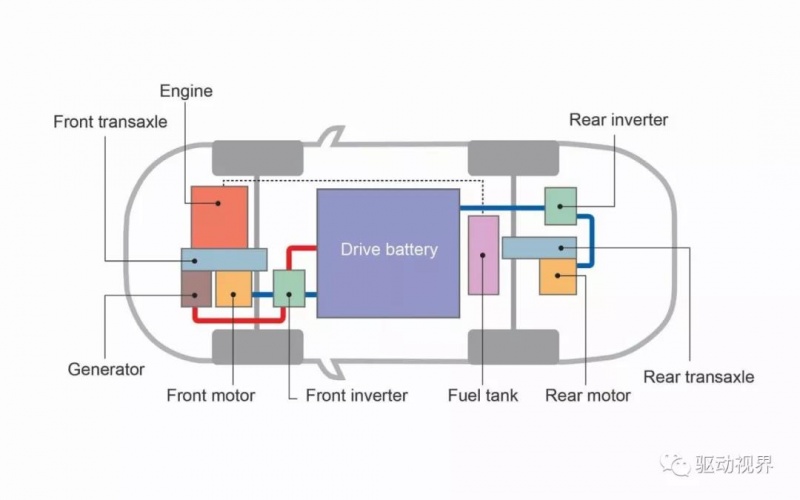
▲欧蓝德底盘布置图,其电驱动布置采取的是p1+p3+p4的型式
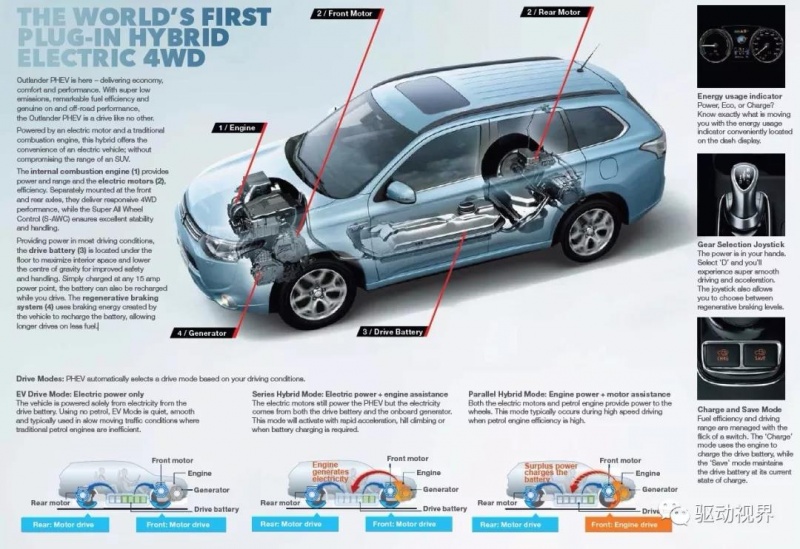
▲欧蓝德PHEV结构和功能详解,小编偷懒就不翻译了,感兴趣的同学请自行研究

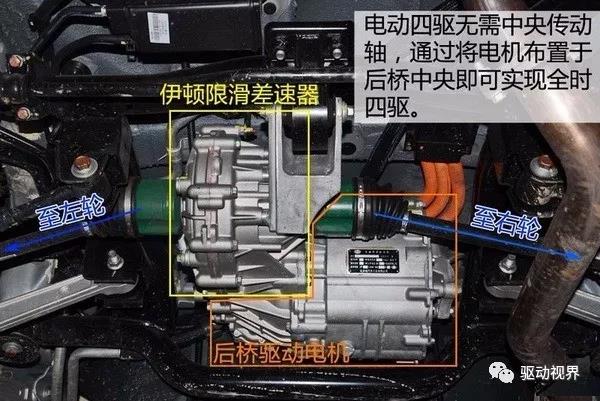
比亚迪唐PHEV通过布置在后桥中间的电机实现全时四驱功能,无需贯穿车底的中央传动轴,提高了车厢内部的地板平整度。
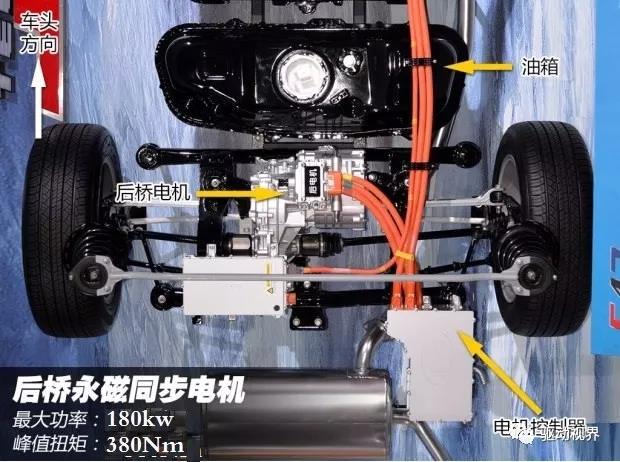
此结构与传统的机械式四驱车有着较大的相似点,但因为前后驱动桥由单独的动力支持,省去了传统4驱车的分动器和主传动轴。

在行驶时唐更像是一款实时4驱车,任何工况下的前后车轮都是驱动轮,可以根据实时路况调节轮速差和力矩分配。

前后驱动桥没有任何钢性联接,即便是在转向或因为路况导致前后驱动桥甚至4条车轮出现轮速差,都可以各自进行独立调节以便保证获得充足的驱动力。

▲比亚迪的NB之处在于电池、电机、电控都能自制

WEY P8 所采用的是由长城汽车自主研发的全新 Pi4 平台,该平台技术的核心是插电混动系统、智能化和四驱技术(前后轴的完全解耦),架构:P0+P4。

硬件组成上则分为前桥和后桥区域,中间并没有传动轴,但同样可以实现智能四驱。
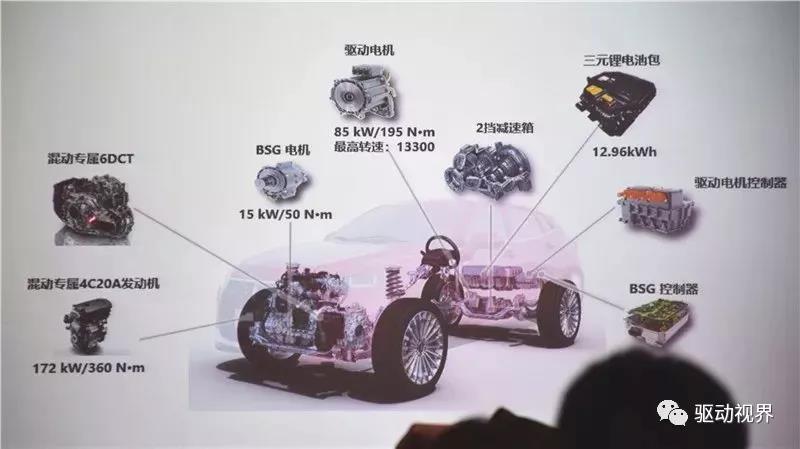
前桥采用带BSG的2.0T发动机+6DCT系统;后桥搭载西门子永磁同步交流电机+舍弗勒两挡减速器。
发动机前置,前轴搭载BSG电机,使启停更平稳;后桥搭载驱动电机,四驱模式下提供更强驱动力;电池组放在行李厢处,平衡前后桥载荷。

总体方案可行性分析
插电混动四驱车型:
a.采用P0+P4构型,前轮由内燃机驱动,后轮由电动机驱动;
b.具有后驱纯电行驶、四驱行驶和内燃机驱动前轮行驶等功能模式;
c.配置:纯电续航≥50km、驱动电机功率≥60kw
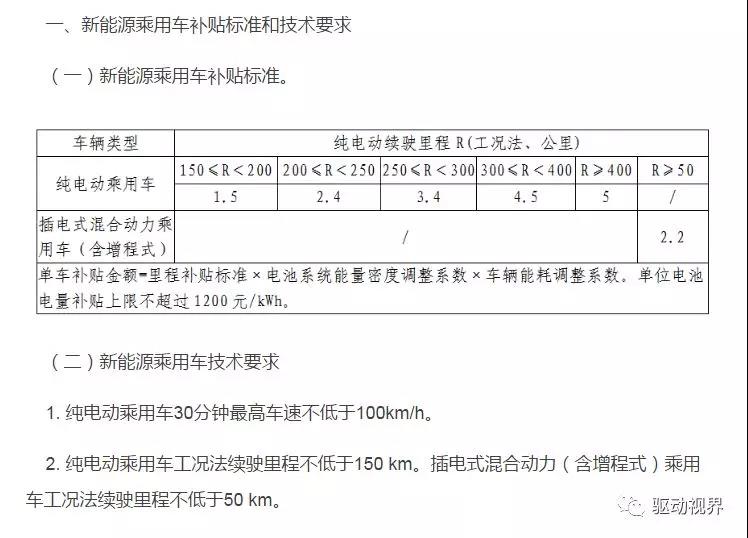
▲为什么纯电续航不能低于50公里?原因在这
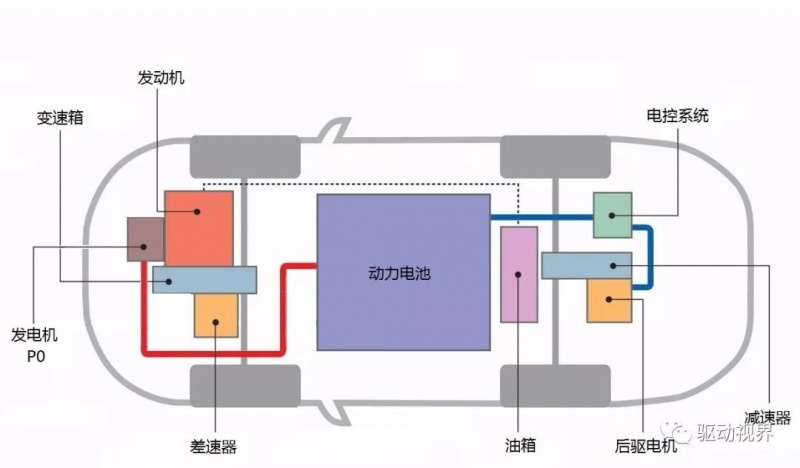
▲P0+P4构型底盘示意图
电动后驱技术方案可行性分析
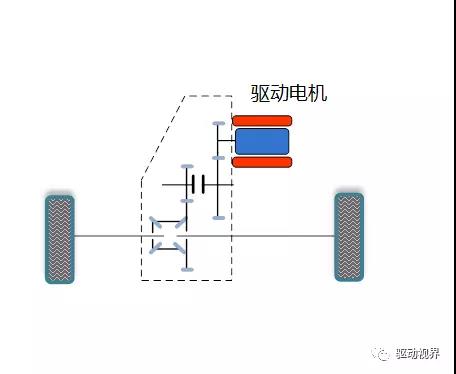
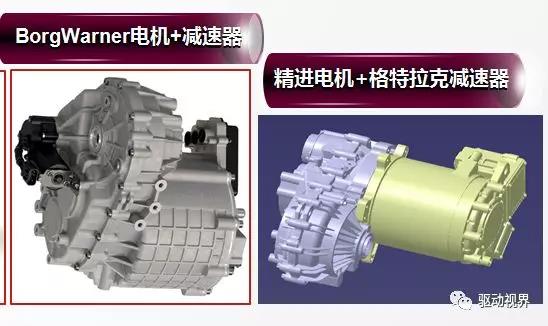
驱动电机:采用永磁同步电机,国内外资源较多
减速器:固定齿比减速器
电机和减速器布置型式:平行轴和同轴均可,同轴成本贵约10%
半轴:等速万向节式驱动轴



后轮电驱的几个方案比较和选择:
混动构型的选择
后驱电机已经确定是P4构型,需要确定的是发电机的位置,现分析如下:
从上述分析可知,P0是较容易实现的方案,即P0+P4的构型,具体还请领导决策。
P0虽然容易实现,但是受限于BSG电机的功率,充电效率有限。
以传统燃油车为基础,通过增加后驱动电机的方式实现四驱,不但契合了新能源汽车的发展趋势,同时也是低成本、对整车原有架构改动较小、较容易实现的一种方式,这种布置能够实现前驱到四驱的切换,可以算是适时四驱的一种。
▲P0-P4构型详解,看不懂的同学自行找资料学习。
主流车型对标分析
注:沃尔沃用的是同轴电机
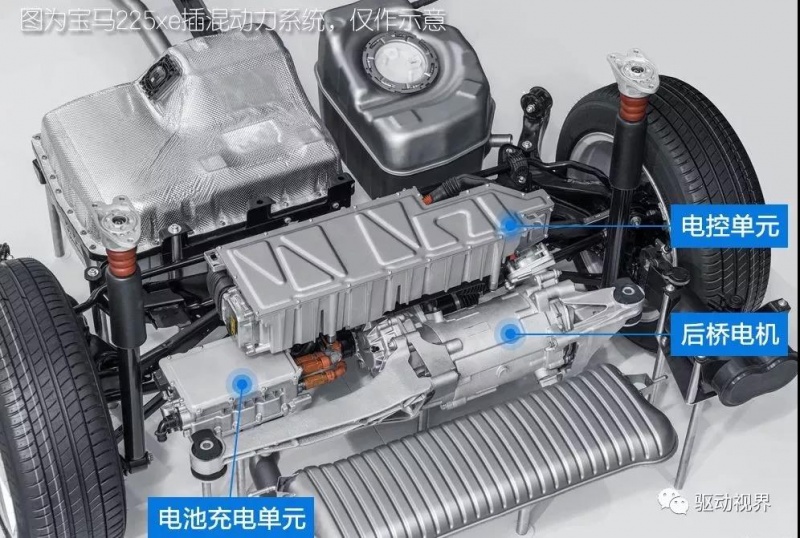
宝马 X1 25Le 的这套混动系统则由一台 1.5T 三缸涡轮增压发动机和一台电机组成,发动机布置在前轴用于驱动前轮,电机布置在后轴用于驱动后轮行驶,不过只有在特定模式下才能实现四驱行驶。
X1插混这套混动系统主要是依靠后桥电机驱动车辆,然后在车辆有必要时才启动发动机协同工作,通过降低发动机工作时间来达成低油耗的目标。
在 EV 模式,此时发动机不启动,电池给后轴上的电机供电,电机驱动后轮行驶,此时车辆处于后驱模式,这也符合宝马一贯以来的特性。
注意其电池和油箱的布置
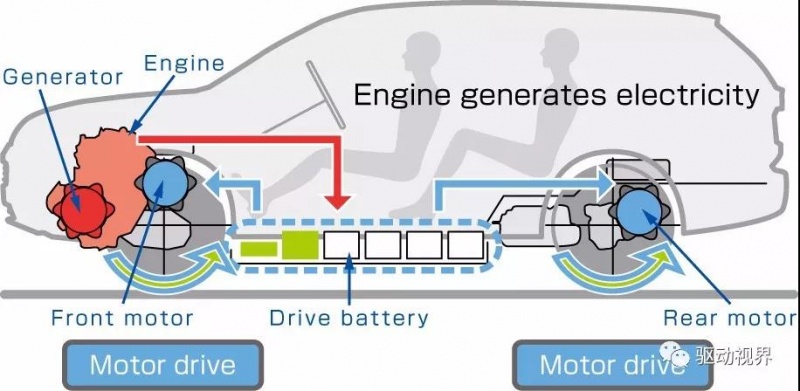
在发动机驱动模式下,此时发动机启动一边驱动车辆行驶,一边给电池充电,此时后轴上的电机不工作,车辆变成前驱模式。
而在混动模式下,发动机和电机同时工作,分别驱动前轮和后轮行驶,此时车辆便变成了四驱模式。
欧蓝德 PHEV 在混动模式下行驶时,具有两种不同的工作模式。
一是通过发动机启动给电池组充电,前后电机驱动车辆前进;另一模式是在电池电量较低,但又需要较大动力输出时,发动机能代替前桥电机直接驱动前轮,后轮则由后桥电机继续驱动。.
三菱为欧蓝德 PHEV 配置的四轮驱动系统称为超级全轮控制(S-AWC)。
这套系统可通过主动后桥控制施加的制动力实现车轮间的扭矩的传输。与此同时,还能选择启用四驱锁止模式,模拟出中央锁止式差速器的效果,优化前后轮的扭矩分配,实现牵引力和转向反馈的平衡
▲欧蓝德底盘布置图,其电驱动布置采取的是p1+p3+p4的型式
▲欧蓝德PHEV结构和功能详解,小编偷懒就不翻译了,感兴趣的同学请自行研究
比亚迪唐PHEV通过布置在后桥中间的电机实现全时四驱功能,无需贯穿车底的中央传动轴,提高了车厢内部的地板平整度。
此结构与传统的机械式四驱车有着较大的相似点,但因为前后驱动桥由单独的动力支持,省去了传统4驱车的分动器和主传动轴。
在行驶时唐更像是一款实时4驱车,任何工况下的前后车轮都是驱动轮,可以根据实时路况调节轮速差和力矩分配。
前后驱动桥没有任何钢性联接,即便是在转向或因为路况导致前后驱动桥甚至4条车轮出现轮速差,都可以各自进行独立调节以便保证获得充足的驱动力。
▲比亚迪的NB之处在于电池、电机、电控都能自制
WEY P8 所采用的是由长城汽车自主研发的全新 Pi4 平台,该平台技术的核心是插电混动系统、智能化和四驱技术(前后轴的完全解耦),架构:P0+P4。
硬件组成上则分为前桥和后桥区域,中间并没有传动轴,但同样可以实现智能四驱。
前桥采用带BSG的2.0T发动机+6DCT系统;后桥搭载西门子永磁同步交流电机+舍弗勒两挡减速器。
发动机前置,前轴搭载BSG电机,使启停更平稳;后桥搭载驱动电机,四驱模式下提供更强驱动力;电池组放在行李厢处,平衡前后桥载荷。
总体方案可行性分析
插电混动四驱车型:
a.采用P0+P4构型,前轮由内燃机驱动,后轮由电动机驱动;
b.具有后驱纯电行驶、四驱行驶和内燃机驱动前轮行驶等功能模式;
c.配置:纯电续航≥50km、驱动电机功率≥60kw
▲为什么纯电续航不能低于50公里?原因在这
▲P0+P4构型底盘示意图
电动后驱技术方案可行性分析
驱动电机:采用永磁同步电机,国内外资源较多
减速器:固定齿比减速器
电机和减速器布置型式:平行轴和同轴均可,同轴成本贵约10%
半轴:等速万向节式驱动轴



编辑推荐




最新资讯
-
奇石乐推出用于DAQ数据采集系统的KiStudio
2025-04-28 17:51
-
全球首次!IVISTA 2023版修订版引入带灯光
2025-04-28 09:59
-
我国首批5G毫米波行业标准送审稿审查通过
2025-04-28 08:56
-
5/16 厦门- 新能源汽车电驱测试技术的创新
2025-04-28 08:53
-
国内首个汽车电磁防护技术验证体系EMTA正式
2025-04-28 08:49
