




 广告
广告





















































无线同步&实时自主位置解算: TJ-UWB定位系统性能分析
2018-09-21 21:44:02· 来源:同济智能汽车研究所 作者:V2X及定位研究室

2定位目标的数量及定位频率方面
这方面,TJ-UWB全面超越目前主流的UWB定位系统。
主要的原因是,目前主流的UWB定位系统需要利用同步控制器来实现全部移动站(标签)、基站(锚点)之间的时间同步,即便像目前有的供应商号称的能够到上万次的扫描,分配到以后数量众多的移动站(标签),定位频率是成反比关系。
举例来说,如果场地内有300辆车,系统容量为10000Hz,则单车定位频率最大只能做到10000/300=33HZ;而且,这300辆车位置的计算,全部需要同一台服务器来实现,由计算带来的延迟也不能忽略。如果还要把计算结果反馈给车辆,通信的压力和延迟更加明显。如果要保证定位质量和定位频率,只能限制车辆的数量。
而TJ-UWB,只需要通过无线信号实现基站间的时间同步;移动站(标签)只要接收基站(锚点)发出的信号即可,并且位置解算也是在各个车载端自身实现。这样,车辆的数量可以没有限制;定位的频率在不同车之间不需要分配,可以稳定保持100HZ甚至以上。
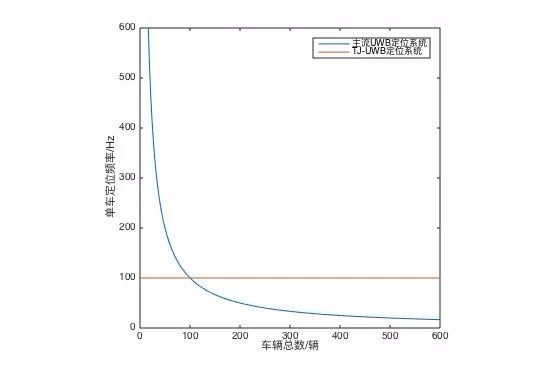
图2 单车定位频率对比
相比较,TJ-UWB无论是在定位目标的数量、定位频率的稳定性方面,有较大优势。
3定位的精度方面
1. 静态定位精确度
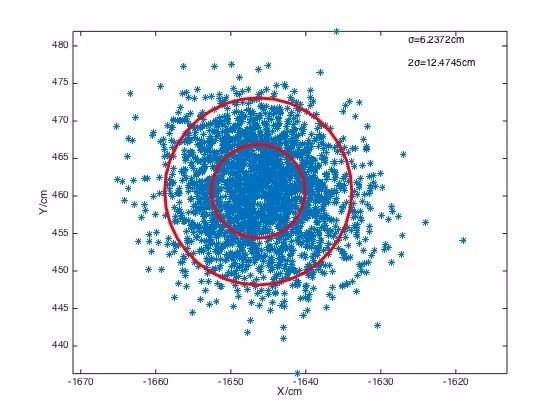
图3 静态定位数据
某位置点在坡道上, 共采集了20秒左右(2000个点);
经过Kolmogorov-Smirnov检验,数据服从正态分布:
定位精确度为6.2cm RMS, 即
68.3%的点落在半径为6.2cm的圆内,
95.4%的点落在半径为12.4cm的圆内。
2. 动态
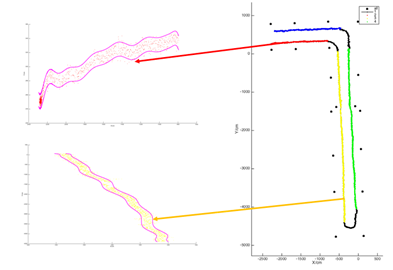
图4动态定位数据
方法:通过多次项拟合,平移来估计轨迹点横向分布宽度。
效果: 横向波动基本上都在±10 cm之内 (95%概率)
这和静态定位精确度可以相互印证。动态精确度横向估计比较容易,而纵向暂时无法估计,但根据误差产生的随机性和各向同性,应该和横向基本一致;
参照目前主流供应商给出的定位精度5~15cm[1][2][3],TJ-UWB能够在真正实现无线同步的情况下,做到中上水平,实属不易。







最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
