




 广告
广告





















































无线同步&实时自主位置解算: TJ-UWB定位系统性能分析
2018-09-21 21:44:02· 来源:同济智能汽车研究所 作者:V2X及定位研究室

4定位的实时性方面
目前主流的UWB定位系统需要利用同步控制器来实现时间同步,需要功能强大的服务器来实现所以车辆的位置解算;针对智能车应用,需要将计算结果回传。总的延迟 通常在50-200ms。
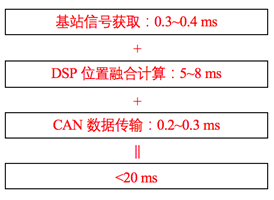
图5 TJ-UWB定位系统延迟
5体积及功耗方面
目前UWB基站功耗5V*0.16A=0.8W ,甚至可以用(太阳能)电池供电。标签更是可以做到1mA以下的待机低功耗,用一个2000mAH电池,可以工作三个月以上。基站体积是目前最小的,标签正在开发多种封装,应对不同的具体应用需求。
.png)
图6 UWB定位基站模块


图7 UWB定位移动端模块
6总结
TJ-UWB定位系统,实测定位精确度与目前市面上精度较高的UWB定位系统相当;而其他指标,无论是在定位目标的数量、定位频率的稳定性、定位的实时性、功耗等方面有突出的优势。能够满足智能汽车特殊场合的定位需求,拓展智能汽车的应用空间。
7参考资料
[1]http://www.uposition.com/nd.jsp?id=13
[2]http://www.kunchen.cc/autonomous.htm
[3]http://www.tsingoal.com/solution_/show.php?lang=cn&id=312
智能汽车研究所联系方式
联系电话
021-69589225
联系邮箱
11666104@tongji.edu.cn
联系人
李老师







最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
