




 广告
广告





















































无线同步&实时自主位置解算: TJ-UWB定位系统性能分析
2018-09-21 21:44:02· 来源:同济智能汽车研究所 作者:V2X及定位研究室

编者按:随着自主泊车等技术的发展,智能车辆对高精度定位的需求已经延伸到了地下车库等没有卫星信号的场景。在这个背景下,基于路边基站信号的无线定位技术得到
编者按:随着自主泊车等技术的发展,智能车辆对高精度定位的需求已经延伸到了地下车库等没有卫星信号的场景。在这个背景下,基于路边基站信号的无线定位技术得到了越来越多的关注,其中UWB定位技术在定位精度上有着明显的优势,且功耗低,对环境干扰小,是较为理想的选择。本文内容呈现了同济智能车研究所V2X及定位研究室在UWB无线定位技术方向的部分研究成果。
随着自主泊车等技术的发展,智能车辆对高精度定位的需求已经延伸到了地下车库等没有卫星信号的场景。在这个背景下,基于路边基站信号的无线定位技术得到了越来越多的关注,其中UWB定位技术在定位精度上有着明显的优势,且功耗低,对环境干扰小,是较为理想的选择。
目前的主流UWB无线定位技术,结构基本类同:在同步控制器的协调下,移动端(标签)发送UWB信号,周围的UWB基站(锚点)同步接收信号,并将信号及工作参数传送到后台服务器,进行包括位置计算等数据处理,最后将位置数据提供给应用方。
但目前这种UWB定位技术在智能汽车方面应用主要有以下几个问题:
结构复杂:通常由移动站、基站、同步控制器、光纤同步网络、服务器等级部分组成;
安装布置难度大:需要用光纤、网线将所有基站连接起来,给现有场地上的定位系统安装增加难度和成本;
技术难度大:主要是时间同步方面,真正能够实现厘米级定位的供应商很少;
成本高:由于包括以上几个因素的存在,整个系统几十甚至几百万元的报价;
针对智能车应用,往往需要将计算结果回传,不仅增加成本,还增加了延迟 (通常在50-200ms),给车辆实时控制增加了难度。
TJ-UWB定位系统,从系统结构设计、工作原理、时间同步技术及定位算法改进等方面进行了颠覆性的创新,并在大部分主要定位性能指标上超越了目前的主流系统。结合目前已经开展的测试结果,分析如下:
1定位系统构架方面
目前市面上大部分UWB定位系统系统结构,主要由移动站(标签)、基站(锚点)、同步控制器、光纤或网线、服务器等五部分组成,其中:
为避免信号冲突,移动站需要同步控制器的调度(部分UWB定位系统无此环节,易造成信号冲突),同步控制器的调度能力限制了系统的容量;也限定了每辆车的频率定位,且定位频率和车辆数量成反比;
需要后台服务器集中处理数据,结果再回传至车辆,服务器的运算能力同样限制了系统容量,车辆越多服务器的计算量越大;且位置信息从服务器回传至车辆有较大的延迟,不利于车辆的动态控制;
需要光纤或网线传递信号,安装布置难度大,成本高。
而TJ-UWB的系统架构,取消了专门的同步控制器,转而由各个基站自动实现精确的时间同步。
时间同步不依赖光纤或网线,直接利用无线信号本身实现同步,大大降低了安装难度和成本。
位置计算实现了车端嵌入式实时计算,不需要后台服务器的支持,不仅降低成本,还提高了实时性。
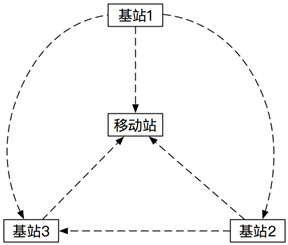
图1 TJ-UWB定位系统结构
所以,从系统架构上,直接减掉了同步控制器、光纤或网线、后台服务器三部分,简化的力度空前。
随着自主泊车等技术的发展,智能车辆对高精度定位的需求已经延伸到了地下车库等没有卫星信号的场景。在这个背景下,基于路边基站信号的无线定位技术得到了越来越多的关注,其中UWB定位技术在定位精度上有着明显的优势,且功耗低,对环境干扰小,是较为理想的选择。
目前的主流UWB无线定位技术,结构基本类同:在同步控制器的协调下,移动端(标签)发送UWB信号,周围的UWB基站(锚点)同步接收信号,并将信号及工作参数传送到后台服务器,进行包括位置计算等数据处理,最后将位置数据提供给应用方。
但目前这种UWB定位技术在智能汽车方面应用主要有以下几个问题:
结构复杂:通常由移动站、基站、同步控制器、光纤同步网络、服务器等级部分组成;
安装布置难度大:需要用光纤、网线将所有基站连接起来,给现有场地上的定位系统安装增加难度和成本;
技术难度大:主要是时间同步方面,真正能够实现厘米级定位的供应商很少;
成本高:由于包括以上几个因素的存在,整个系统几十甚至几百万元的报价;
针对智能车应用,往往需要将计算结果回传,不仅增加成本,还增加了延迟 (通常在50-200ms),给车辆实时控制增加了难度。
TJ-UWB定位系统,从系统结构设计、工作原理、时间同步技术及定位算法改进等方面进行了颠覆性的创新,并在大部分主要定位性能指标上超越了目前的主流系统。结合目前已经开展的测试结果,分析如下:
1定位系统构架方面
目前市面上大部分UWB定位系统系统结构,主要由移动站(标签)、基站(锚点)、同步控制器、光纤或网线、服务器等五部分组成,其中:
为避免信号冲突,移动站需要同步控制器的调度(部分UWB定位系统无此环节,易造成信号冲突),同步控制器的调度能力限制了系统的容量;也限定了每辆车的频率定位,且定位频率和车辆数量成反比;
需要后台服务器集中处理数据,结果再回传至车辆,服务器的运算能力同样限制了系统容量,车辆越多服务器的计算量越大;且位置信息从服务器回传至车辆有较大的延迟,不利于车辆的动态控制;
需要光纤或网线传递信号,安装布置难度大,成本高。
而TJ-UWB的系统架构,取消了专门的同步控制器,转而由各个基站自动实现精确的时间同步。
时间同步不依赖光纤或网线,直接利用无线信号本身实现同步,大大降低了安装难度和成本。
位置计算实现了车端嵌入式实时计算,不需要后台服务器的支持,不仅降低成本,还提高了实时性。
图1 TJ-UWB定位系统结构
所以,从系统架构上,直接减掉了同步控制器、光纤或网线、后台服务器三部分,简化的力度空前。







最新资讯
-
推荐性国家标准《乘/商用车电子机械制动卡
2025-04-30 11:13
-
载荷分解
2025-04-30 10:46
-
布雷博在上海开设亚洲首个灵感实验室
2025-04-30 10:25
-
组分性能对锂离子电池卷芯挤压力学响应的影
2025-04-30 09:00
-
美国发布自动驾驶新框架,放宽报告要求+扩
2025-04-30 08:59
