




 广告
广告





















































安全自动驾驶必经之路:NVIDIA开放DRIVE Constellation模拟平台

自动驾驶不仅仅意味着取代人类驾驶员,它还涉及到打造比人类驾驶员更安全的AI驾驶员。

知名资询公司兰德(RAND Corporation)指出,要使AI驾驶员的表现优于人类20%,就需要进行总距离为110亿英里的验证工作,相当于让现实世界中的100辆车不停地开500多年,这显然是无法做到的。
不过,模拟技术为这个曾经不可逾越的障碍提供了解决方案。在虚拟世界中,开发人员可以安全并精确地测试和验证自动驾驶的硬件和软件。
“模拟平台的持续整合过程可以大大提高我们工程师的工作效率,”NVIDIA创始人兼首席执行官黄仁勋表示。“人工智能系统的模拟能力对于成功至关重要”。
然而,只有当模拟工具准确表示现实世界的多样性和不可预测性的时候,它才能被有效利用来开发安全的自动驾驶技术。
因此,NVIDIA宣布开放DRIVE Constellation模拟平台,与合作伙伴携手整合各自的世界模型、汽车模型和交通场景。
有了不同合作伙伴的加入,DRIVE Constellation将变得更加全面,以支持多种多样和复杂的测试元素。
有效模拟的关键要素
模拟测试环境不仅是虚拟道路或虚拟汽车这么简单。它要像电影那样密集地建模,还要像汽车实际行驶的城市道路和高速公路的蓝图一样细致和精确。
该虚拟世界不仅要看起来真实,还必须遵守物理定律。DRIVE Sim可以设计出模拟测试的任何潜在的环境和驾驶情形,并能整合世界模型(World Model)、汽车模型(Vehicle Model)和交通场景模型(Traffic Scenario Model)。
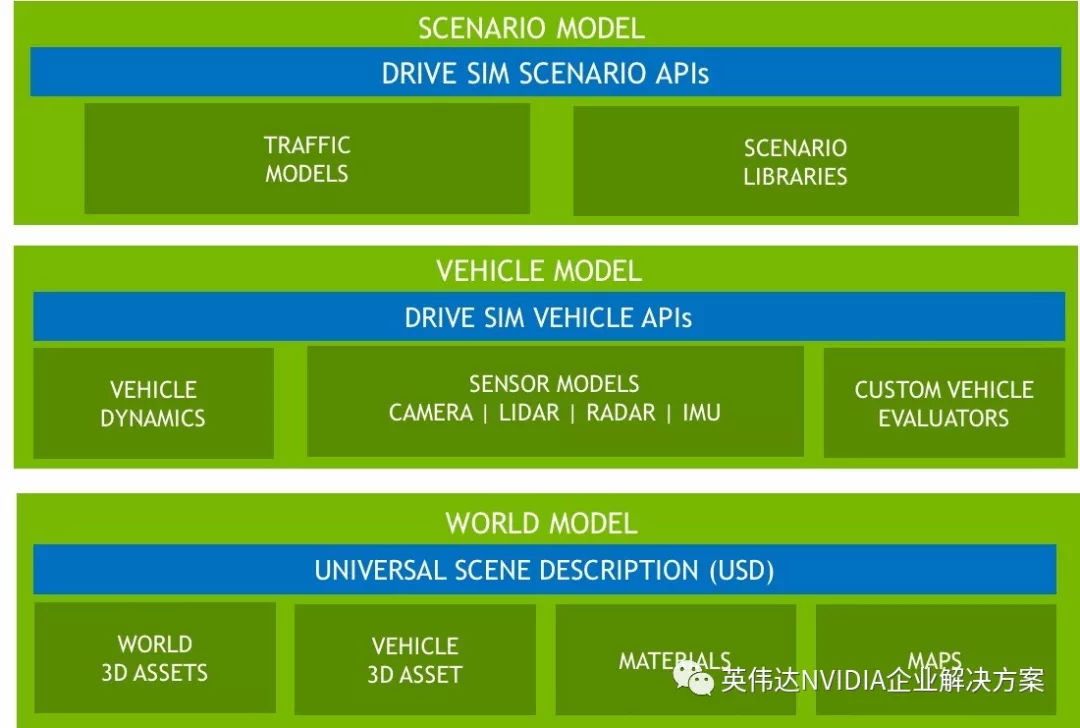
- 世界SIM模型:
虚拟城市并非一天建成的。例如,要在旧金山进行模拟测试,开发人员必须首先创建地图。然后,在地图中加入建筑、树木和其他地标——必须将城市的每一英寸都表示出来,以便创造与现实世界一样严谨细致的测试环境。
此虚拟世界还必须模拟从光线到天气的现实世界条件。无需离开模拟平台,就能让汽车在一个晴朗的早晨行驶在加利福尼亚州的山景城,并穿过旧金山的浓雾。
- 传感器和汽车SIM模型:
不同于人类驾驶员,自动驾驶汽车不只是依靠视觉信息来了解周围的世界。摄像头、雷达和激光雷达传感器能够为汽车提供数据,供其做出决定。综合模拟平台应模仿这些数据来源,并测试算法如何应对不同的传感器输入。
虚拟汽车在模拟环境中的表现还必须像在现实世界中一样。像刹车、在高速公路上加速或在崎岖不平的道路上行驶等动作,应表现出与现实中的汽车做这些动作时相同的汽车动力学特性。
- 交通和场景模型:
要创造近似事故的逼真情形,开发人员首先必须观察并重建现实世界的示例,然后通过在模拟器中改变天气、光线和道路状况来创造多种场景。要可靠地验证自动驾驶硬件和软件,多变的环境状况必不可少。
这些场景还必须如实反映每个测试环境的交通规则。例如,模拟在匹兹堡驾车时,必须遵循“匹兹堡式左转”的操作,即在十字路口时,汽车需在对向车辆通过之前左转。
广泛的合作伙伴网络
通过向合作伙伴开放DRIVE Sim,该平台的深度和灵活性都得到提升。整合世界模型、汽车模型和交通模型的能力提高了自动驾驶车辆测试和验证的效率。
目前,众多模拟公司已在DRIVE Constellation平台上与NVIDIA达成合作。这些公司涵盖世界模型、汽车和传感器模型以及交通和场景模型开发等领域。








最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
