




 广告
广告





















































Apollo自动驾驶 |定位技术


定位(Location)是让无人驾驶汽车知道自身确切位置的技术,这是一个有趣且富有挑战的任务,对于无人驾驶汽车来说非常重要。
假设你在驾驶一辆车时彻底迷路了,你不知道自己实际在哪个地方。假设你有一张全球的高精度地图,定位的任务就是确定你的汽车在这张高精度地图上的位置。
在我们的日常生活中,通常使用手机的GPS来确定自己的位置。但GPS对于无人驾驶汽车来说不够精确。大多时候,GPS的精度在1至3米之间,在一些情况下,比如被高楼、山脉围绕或位于峡谷内时,可能只有10米,甚至50米,这对于无人驾驶汽车来说太不精确了。因此 ,我们必须找到另一种方法来更准确定位车辆在地图上的位置。
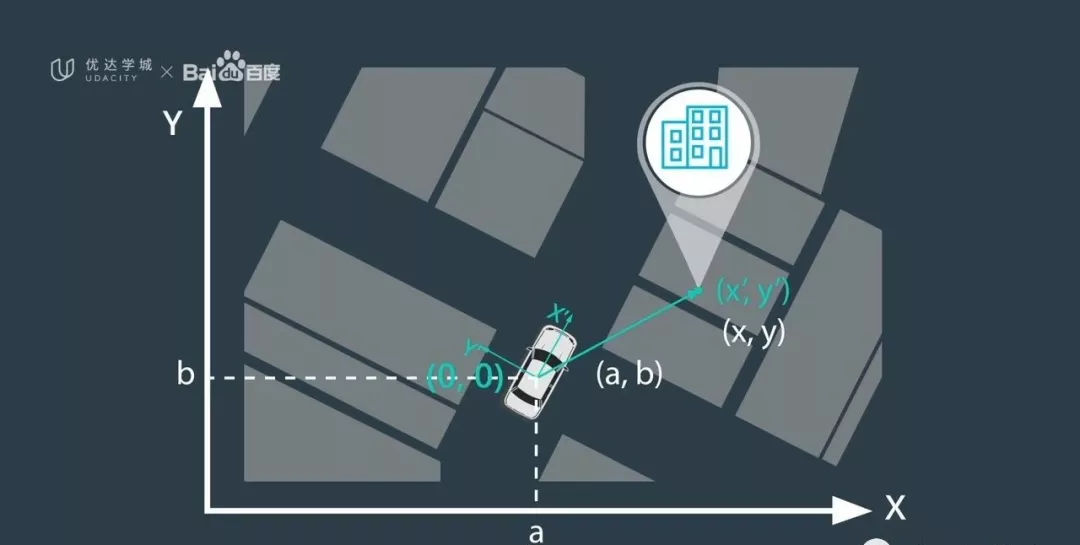
最常用的方法是, 将汽车传感器所看到的内容与地图上所显示的内容进行比较。车辆传感器可以测量车辆与静态障碍物之间的距离,我们可以在车辆自身坐标系中测量这些距离以及这些静态障碍物的方向。
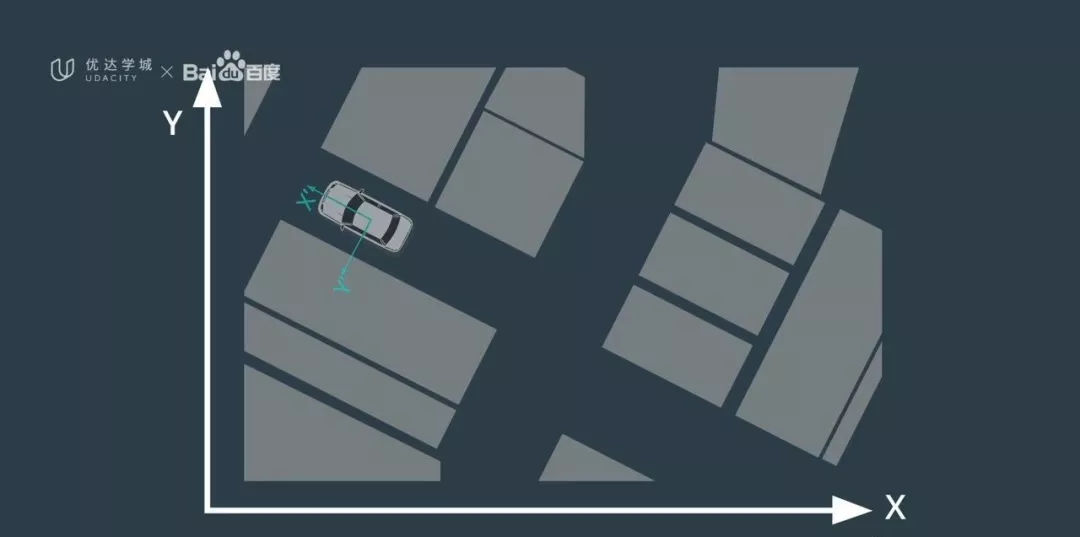
在车辆坐标系中,汽车的前进方向始终向前。当汽车左转或右转时,坐标系与汽车一起旋转,以使车辆的前进方向在坐标系中继续向前。随着车辆转弯,车辆自身的坐标系必然与地图坐标系不一致。车辆坐标系和地图坐标系可能取决于导航系统中的设置。
在地图上也可能找到车辆传感器所检测到的地标。为估计车辆在地图上的位置,我们将传感器的地标观测值与这些地标在地图上的位置进行匹配。无人驾驶汽车软系统必须将传感器的测量值从车辆坐标系转换为地图坐标系,反之亦然。执行这类转换是解决定位问题的关键步骤。
实现无人驾驶汽车定位有很多方法,接下来将探讨几种常见的定位方法,如GNSS RTK、惯性导航、LiDAR定位和视觉定位。
1. GNSS RTK
如果在野外迷路,你会怎么做?假如你看到自己离一棵树75米远,那么现在你比刚才更清楚自己可能处于什么位置。但你仍不知道自己的确切位置。
然后,你看到了一个离自己64米远的房子,你对自己的位置更确定了一步,即你位于两个圆的其中一个交点上。
现在你又看到了第三个路标,即离自己55远的路灯。通过这三个地标,你终于可以确定自己的确切位置了。
如果你有一张精确的地图,里面标注了这些地标的位置,你就可以利用上面的方法来确定自己的确切位置了,这就是三角测量法。
上面介绍了二维空间中的定位方法,那么如何在地球表面进行三维定位呢?其实,我们可以利用卫星,通过计算我们与卫星之间的距离来实现定位,这就是GPS的工作原理。
GPS即全球定位系统,这是一种由美国开发,并在全球范围内运营的卫星导航系统,这类系统通用名称为GNSS(全球导航卫星系统)。
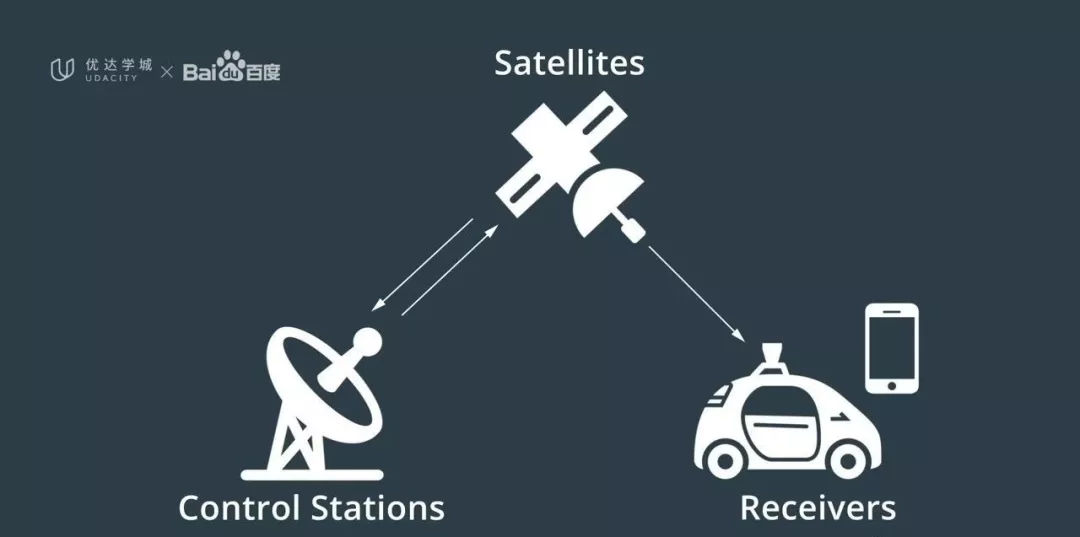
GPS分为三个部分,第一部分是卫星。在任何特定时间,大约有30颗GPS卫星在外层空间运行。它们各自距离地球表面约2万公里。
该系统的第二部分由世界各地的控制站组成,控制站用于监视和控制卫星。其主要目的是让系统保持运行,并验证GPS广播信号的精确度。
最后一部分是GPS接收器,其广泛存在于手机、电脑、汽车、船只以及许多其他设备中。如果周围没有高楼等障碍物,并且天气良好,那么无论你身在何处,GPS接收器每次应至少检测到四颗GPS卫星。
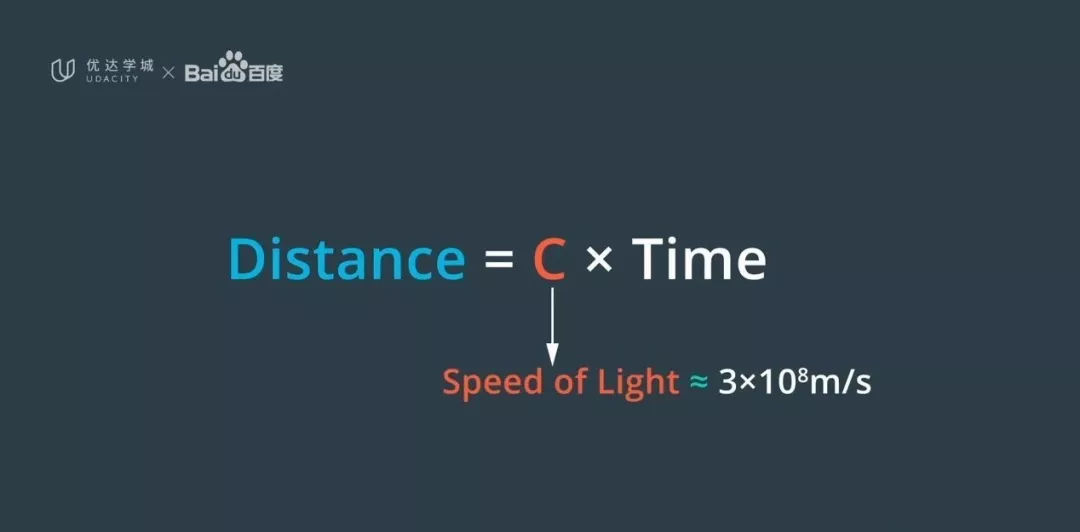
GPS接收器实际并不直接测量你与卫星之间的距离。它首先测量信号的传输时间,通过将这个传输时间乘以光速来计算卫星的距离。由于光速非常之大,即使少量的时间误偏差也会造成巨大的误差。因此,每颗卫星都配备了高精度的原子钟。
为了进一步减小误差,还可以使用实时定位技术,即RTK。RTK需要在地面上建立几个基站,每个基站都知道自己精确的“地面实际”位置。同时,每个基站也通过GPS测量自己的位置。基站的实际位置与GPS测量位置之间的偏差,就是GPS实际的测量误差。
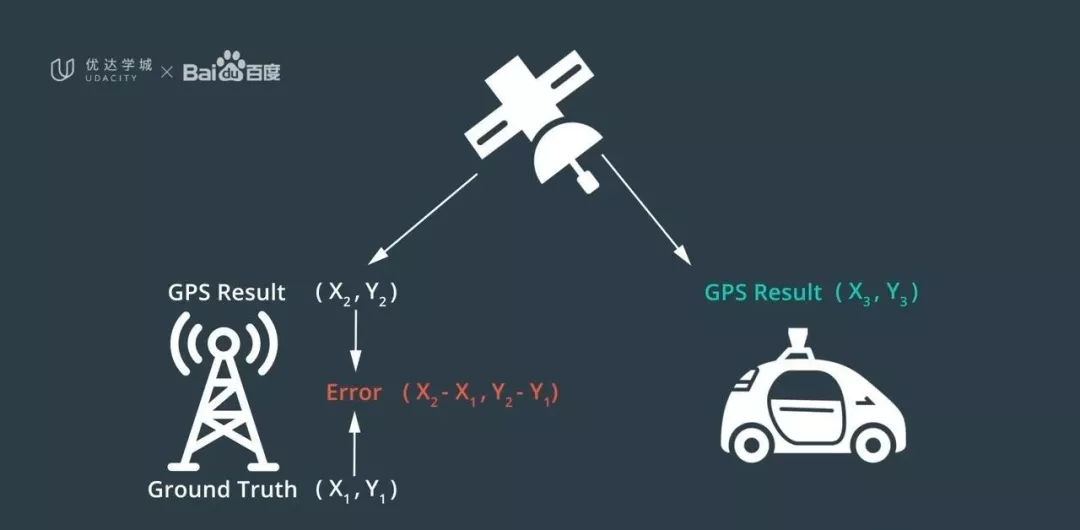
然后将这个误差传递给其他GPS接收器,以供其调整自身的位置计算。采用RTK技术后,GPS可以将定位误差限制在10厘米以内。但是,当存在高楼或其他障碍物时,仍可能阻挡GPS信号,从而降低定位精度。
GPS的另一个缺点在于它的更新频率很低,大约为10Hz(每秒更新10次)。由于无人驾驶汽车在快速移动,因此需要频繁的更新位置信息,这时GPS就难以满足使用要求了。
- 下一篇:工信部出重拳整治新能源车安全隐患,全面排查、6小时上报
- 上一篇:自动驾驶平台盘点



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
