




 广告
广告





















































自动驾驶基础 --混合固态激光雷达

2016年1月的CES消费电子展会上,Velodyne展示了“混合固态超级冰球”(Solid-State Hybrid Ultra Puck Auto),由此引入了混合固态激光雷达(LiDAR)的概念。

上图中, 左图就是32线混合固态Ultra Puck Auto;右图则是16线机械式VLP-16。这款高性能32线UltraPuckAuto和机械式VLP-16相比,外观上除了颜色略有差异以外,尺寸几乎一样(高为72毫米,底部直径为103毫米),具有体积小、重量轻的特点,可以集成在汽车后视镜的位置
在前一篇文章中,我们谈到了机械式LiDAR,了解到机械式LiDAR在工作时发射系统和接收系统会一直360度地旋转。而混合固态LiDAR工作时,单从外观上是看不到旋转的,巧妙之处是将机械旋转部件做得更加小巧并深深地隐藏在外壳之中。
对于混合固态激光雷达的定义, 各家厂商有所不同,本文将按照业界习惯,对采用半导体“微动”器件——MEMS扫描镜(代替宏观机械式扫描器,MEMS指的是微机电系统)在微观尺度上实现LiDAR发射端的激光扫描方式,定义为“混合固态”。而全固态LiDAR的定义和相关工作原理,我们将在下面的文章中做详细说明。
为什么产生“混合固态”的概念呢?因为MEMS扫描镜是一种硅基半导体元器件,属于固态电子元件;但是MEMS扫描镜并不“安分”,内部集成了“可动”的微型镜面;由此可见MEMS扫描镜兼具“固态”和“运动”两种属性,故称为“混合固态”。可以说,MEMS扫描镜是传统机械式LiDAR的革新者,引领LiDAR小型化和低成本化。其取消了机械式激光雷达的机械旋转结构,利用MEMS微振镜,将所有的机械部件集成到单个芯片,利用半导体工艺生产。基于MEMS的固态雷达,是通过微振镜的方式改变单个发射器的发射角度进行扫描,由此形成一种面阵的扫描视野。目前基于MEMS方式的激光雷达,技术上更容易实现,且价格也比较低廉,有很多的厂家在研发,也因此被主机厂商一致看好。
下图是基于MEMS扫描镜的混合固态LiDAR原理图:
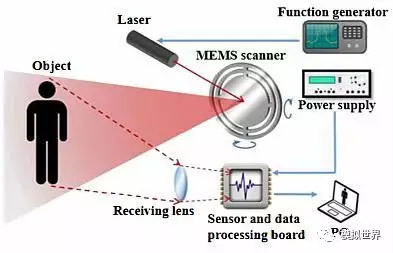
传统的扫描成像LiDAR系统一般采用双摆镜、双振镜和旋转多面体反射棱镜的扫描方式,由这些具有宏观尺寸的光学元件所构成的扫描系统体积庞大而笨重。而利用MEMS技术可以直接在硅基芯片上集成体积十分精巧的微型扫描镜,并通过MEMS扫描镜来反射激光器的光线,从而实现微米级的运动扫描,那么宏观上便看不到LiDAR中的任何机械旋转部件。
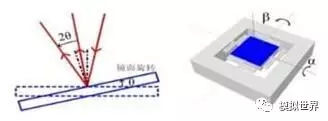
下图是MEMS扫描镜示意图,微型镜面可以转动,从而实现对激光的操控。
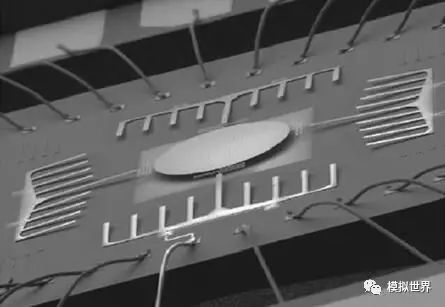
下图是一款MEMS扫描镜的SEM照片。
MEMS扫描镜是指光学偏转角度较大(达到10°以上)的一种微镜类型,主要功能是实现激光的指向偏转、图形化扫描。MEMS扫描镜采用光学MEMS技术制造的,把微光反射镜与MEMS执行器集成在一颗半导体芯片上。MEMS扫描镜的运动方式包括平动和扭转两种机械运动。MEMS扫描镜按原理区分,主要包括四种:静电驱动、电磁驱动、电热驱动、压电驱动。其中前两种技术比较成熟,应用也更广泛。四种原理的MEMS扫描镜性能比较见下表。
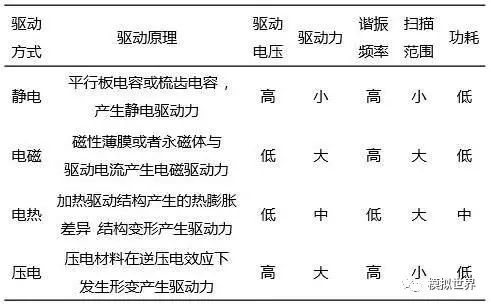
目前,技术成熟且量产的MEMS扫描镜企业基本集中在中国大陆地区以外。比如被英飞凌收购的MEMS公司Innoluce、台湾OPUS、美国Mirrorcle的MEMS扫描镜采用的是静电驱动模式;而博世最新推出的全新交互式激光投影微型扫描仪BML050中的MEMS扫描镜、滨松今年发布的MEMS微镜S12237-03P、意法半导体与美国MicroVision公司合作生产的MEMS扫描镜,均采用电磁驱动原理。而国内如无锡微奥科技、西安知微传感、常州创微电子、上海微技术工研院等企业也都在此领域摩拳擦掌,希望有所斩获。后面,我们会对MEMS扫描镜技术做详细介绍。
而对于运用MEMS扫描镜技术设计混合固态雷达的国内厂商,主要是速腾聚创(RoboSense)。速腾聚创是一家研发机器人感知产品的激光雷达公司,其固态激光雷达RS-LiDAR-M1Pre曾在今年的CES展上正式对外公布,M1 Pre的探测距离超过 200米,水平测角与垂直测角为63 °*20°,刷新帧率为20fps,角分辨率为0.09°*0.2 °。

据了解,这是目前全球范围内已发布MEMS激光雷达中最小角分辨率的一款产品。最小角分辨率意味着激光雷达拥有洞察分毫的探测能力。



编辑推荐




最新资讯
-
奇石乐推出用于DAQ数据采集系统的KiStudio
2025-04-28 17:51
-
全球首次!IVISTA 2023版修订版引入带灯光
2025-04-28 09:59
-
我国首批5G毫米波行业标准送审稿审查通过
2025-04-28 08:56
-
5/16 厦门- 新能源汽车电驱测试技术的创新
2025-04-28 08:53
-
国内首个汽车电磁防护技术验证体系EMTA正式
2025-04-28 08:49
