




 广告
广告





















































基于改进的HMM方法预测驾驶员行为

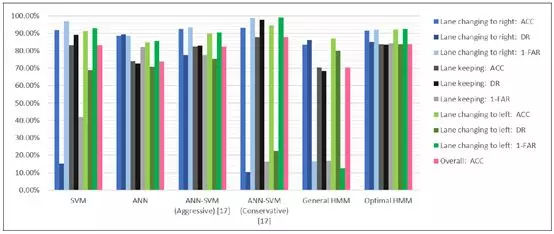
图6. 9个测试数据集的平均ACC、DR和FAR由不同模型实现
为了验证模型在驾驶行为预测方面的有效性,使用其他算法进行比较。人工神经网络(ANN)和支持向量机(SVM)等典型算法用于建立驾驶行为模型。在[17]中,作者建立了三个模型,包括ANN,SVM,组合ANN和SVM(ANN-SVM)来估计公路车道下降时的车道变换行为。这两种算法的优点是它们不需要数据处理。为了评估这些方法,将实际驾驶行为与所有数据集的估计驾驶行为进行比较。然后,计算每个驾驶行为的ACC,DR和FAR。每组的相应速率如图6所示。从结果(图6)可以说,在预滤波器的最佳选择之后,所有ACC,DR以及(1-FAR)值都较大超过80%。尽管仍然可以找到一些例外,例如ANN-SVM(保守)的一些ACC高于最佳HMM,但是DR的值减小。为了进一步评估驾驶行为预测的性能,接收器操作特性(ROC)图如图7所示。从结果可以看出,使用最优HMM,DR最高,FAR最低。方法。因此,最佳HMM在所有模型中都具有最佳性能。
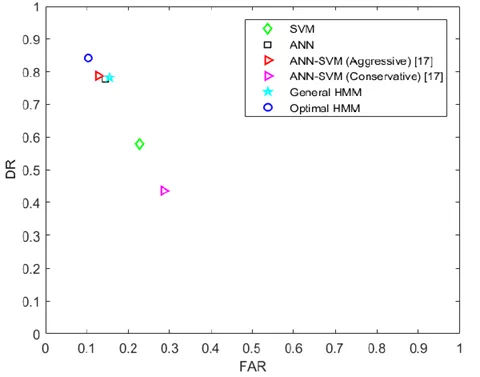
图7.不同模型的ROC图
IV.总结和结论
在该研究中,基于隐马尔可夫模型( HMM )开发了一个驾驶行为预测模型。包括左/右车道变换和车道保持在内的三种不同的驾驶动作被建模为HMM的隐藏状态,并使用驾驶模拟器在高速公路场景中进行模拟。基于HMM,可以通过观察状态推断出不可观察的状态。所考虑的方法基于这样的假设,即相关的物理变量被离散成若干段,以考虑典型的传感器特性。通过寻找最佳预滤波器,而不是优化HMM模型,考虑并改进了HMM的预测性能。在该方法中,基于从9个不同测试驱动程序获得的数据,验证了该方法。每次都选择不同位置的子集进行训练和测试。在相同的实验数据集上,使用观察段范围的一般(预先设置的)值和最终(优化的)值来比较HMM模型。
最终获得的结果显示HMM识别驾驶员行为的能力显著提高。结果表明,除了分类器(这里:HMM )之外,组合的预设和适应策略对该方法的统计特性有显著影响。使用最佳参数的HMM模型提高了检测率和准确性,同时降低了误报率。通过选择最佳预过滤参数,预测性能可以得到改善,这一点已在该研究中得到成功证明。
REFERENCES
[1] F. L. Mannering and C. R. Bhat,Analytic methods in accident research: Methodological frontier and futuredirections, Analytic Methods in Accident Research, vol. 1, pp. 1-22, 2014.
[2] T. Gindele, S. Brechtel, and R. Dillmann,Learning Context Sensitive Behavior Models from Observations for PredictingTraffic Situations,16th International IEEE Annual Conference on IntelligentTransportation Systems, pp. 1764-1771, 2013.
[3] G. Agamennoni, J. I. Nieto, and E. M.Nebot, Estimation of Multivehicle Dynamics by Considering ContextualInformation, IEEE TRANSACTIONS ON ROBOTICS, vol. 28, no. 4, pp. 855-870, 2012.
[4] D. S. Hurwitz, H. Wang, M. A. KnodlerJr., D. Ni, and D. Moore, Fuzzy sets to describe driver behavior in the dilemmazone of highspeed signalized intersections, Transportation Research Part F:Traffic Psychology and Behaviour, vol. 15, no. 2, pp. 132-143, 2012.
[5] L. R. Rabiner, A tutorial on HiddenMarkov Models and selected applications in speech recognition, Proceedings ofthe IEEE, vol. 77,pp. 257-286, 1989.
[6] T. K. Moon, The expectation-maximizationalgorithm, IEEE Signal Processing Magazine, vol. 13, no. 6, pp. 4760, 1996.
[7] K. Tokuda, Y. Nankaku, T. Toda, H. Zen,J. Yamagishi, and K. Oura, Speech Synthesis based on Hidden Markov Models, ,vol. 101, no. 5, pp. 1234-1252, 2013.
[8] R. Sasikumar and V. Kalpana, HiddenMarkov Model in Biological Sequence Analysis A Systematic Review, InternationalJournal of Scientific and Innovative Mathematical Research (IJSIMR), vol. 4,no.3, pp. 1-7, 2016.
[9] P. Afsar, P. Cortez, and H. Santos, AutomaticHuman Action Recognition from Video using Hidden Markov Model, 2015 IEEE 18thInternational Conference on Computational Science and Engineering, pp. 105-109,2015.
[10] D. Tran, W. Sheng, L. Liu, and M. Liu,A Hidden Markov Model based driver intention prediction system, The 5th AnnualIEEE International Conference on Cyber Technology in Automation, Control andIntelligent Systems, pp. 115-120, 2015.
[11] V. Gadepally, A. Krishnamurthy, and U¨. O¨ zgu¨ner, A framework for Estimating Driver Decisions Near Intersections,IEEE Transactions on Intelligent Transportation Systems, vol. 15, No. 2, pp.637-646, 2014.
[12] Ja.Z. Varghese and R.G. Boone Overviewof Autonomous Vehicle Sensors and Systems, International Conference onOperations Excellence and Service Engineering, pp. 178191, 2015.
[13] D. M. Powers, evaluation: from Precision,Recall and F-measure to ROC, Informedness, Markedness and Correlation, Journalof Machine Learning Technologies, vol. 2, no. 1, 2011, pp. 37-63, 2011.
[14] A. Mukhopadhyay, U. Maulik, S.Bandyopadhyay, and C. A. C. Coello, A Survey of Multiobjective EvolutionaryAlgorithms for Data Mining: Part I, IEEE Transactions on EvolutionaryComputation, vol. 18, no. 1, pp. 4-19, 2014.
[15] K. Chu, An introduction tosensitivity, specificity, predictive values and likelihood ratios, EmergencyMedicine, vol. 11, no. 3, pp. 175181, 1999.
[16] K. Deb, A. Pratap, S. Agarwal, and T.Meyarivan, A Fast and Elitist Multiobjective Genetic Algorithm: NSGA-II, IEEETransactions on Evolutionary Computation, vol. 6, No. 2, pp. 182-197, 2002.
[17] Y. Dou, F. Yan, and D. Feng, LaneChanging Prediction at Highway Lane Drops Using Support Vector Machine andArtificial Neural Network Classifiers, IEEE International Conference onAdvanced Intelligent Mechatronics, vol. 1, pp. 901-906, 2016.
作者情况:
1 Qi Deng, Jiao Wang, and Dirk So¨ffker are with Chair of Dynamics and Control, University of Duisburg-Essen, Duisburg, Germany qi.deng, jiao.wang, soeffker@uni-due.de
本文来源于IEEE IV 2018论文集,智车科技(IV_Technology)Darkiller编译,转载请注明来源。







最新资讯
-
每秒采集100万个数据 | 下一代USB DAQ产品-
2025-04-07 14:12
-
重型商用车辆和客车的动力学——振动环境
2025-04-07 14:11
-
2025年10大隐形车衣品牌排行榜
2025-04-07 10:40
-
沃尔沃卡车与Greenlane合作推动商业电动化
2025-04-07 08:42
-
江铃晶马:美标转欧标充电结构专利
2025-04-07 08:39
