




 广告
广告





















































同济智能汽车研究所在研项目在工博会展出

【导读】9月19日第二十届中国国际工业博览会高校展区,同济大学汽车学院的同济增程式混合动力系统项目,以及由上海市科委资助,同济大学新能源汽车工程中心智能汽车研究所、同济汽车设计研究院有限公司共同研发的智能驾驶电动清扫车项目,在国家会展中心(上海)6.2H馆的正式展出。项目践行了本届工博会 “中国制造2025”国家战略,突出了“创新、智能、绿色”主题。
同济增程式混合动力系统项目
同济增程式混合动力系统项目依托于同济大学新能源汽车工程中心智能汽车研究所,由韩志玉教授担任项目负责人,团队目前已经形成约20人的专职开发技术团队。
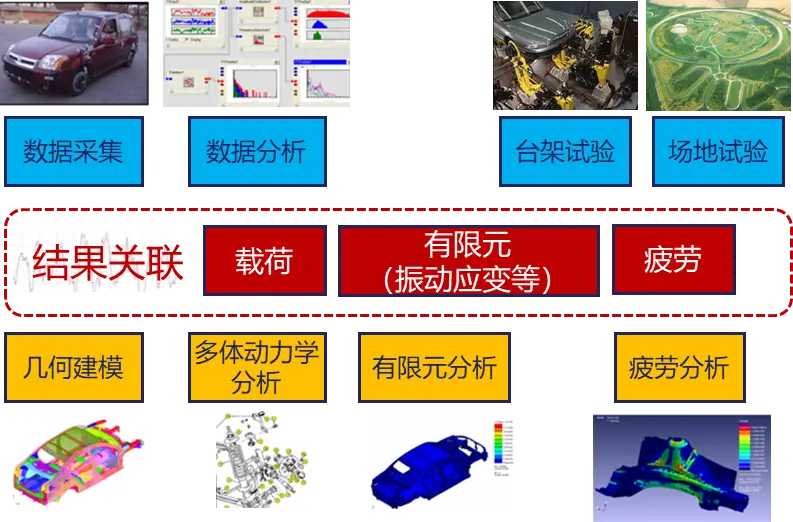
项目基于同济大学专利的一种新型高性价比车用增程式混合动力系统,从发动机匹配与优化、混动变速箱的结构设计、混动控制器的软硬件开发、变速箱控制器的软硬件开发、整车系统匹配与集成等多个方面进入深入、自主的研发设计。
该研发系统根据驾驶员需求、车辆实际工作状态及实际工况等边界条件,通过优化的控制策略,实现多种混动工作模式的平稳切换。整车具有综合效率更高、动力性更好、成本低等优势,满足在不同情况下整车的动力性及经济性要求。

韩志玉教授接受采访并做讲解
同济智能驾驶电动清扫车项目
由上海市科委资助,同济大学新能源汽车工程中心智能汽车研究所、同济汽车设计研究院有限公司共同研发的智能驾驶电动清扫车也亮相于第20届中国国际工业博览会。
研发团队致力于面向特殊应用场景的无人驾驶专用车辆,其中智能驾驶电动清扫车是产学研合作的重要成果之一。智能驾驶电动清扫车能够在封闭园区内按照固定路线独立自主地完成清扫作业,清扫任务完成后能够自动回到停车点。
整车融合了高精度定位导航系统、智能感知与控制系统、远程监控系统和线控底盘系统,车辆装备了激光雷达,单目相机,超声波雷达等传感器。在无人驾驶模式下,可实现固定路线清扫、广场清扫、沿路沿清扫、行人和减速带识别、遇减速带提升作业机构、智能避障、远程监视与控制等功能。清扫作业最高车速5km/h,清扫作业时间≧6h,清扫宽度1900mm,工作效率≧13000m2/h。主要创新点如下:
- 基于激光雷达、超声波雷达、摄像头、V2I在内的多传感器信息融合一体化智能感知系统;
- 面向特定应用场景的多模式智能决策与轨迹规划策略;
- 面向清扫应用的复杂卫星定位条件下的低成本组合定位技术;
- 高可靠性线控制动解决方案,以及有人/无人双模驾驶功能的新型线控底盘;
- 可实现平行驾驶的实时远程监控与遥控系统。
目前该车已完成4辆工程化清扫车的试制和调试工作,并计划于2019年在上海市嘉定区开展30辆智能清扫车示范运行。

熊璐教授接受采访并做讲解





最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
