




 广告
广告





















































基于交叉几何和实测速度的转向车辆轨迹预测
2018-11-01 19:57:27· 来源:IEEE IV 2018论文集,智车科技(IV_Techno

B.使用EKF的速度使用EKF
我们使用EKF预测未来许多时间内的车辆位置。预测车辆位置不仅需要期望的速度,还需要期望的横摆角速度。我们基于[ 5 ]实现了期望的横摆角速度模型。他们的模型输出横摆角速度,以便沿着轨迹图顺利通过。我们将车辆状态定义为XP =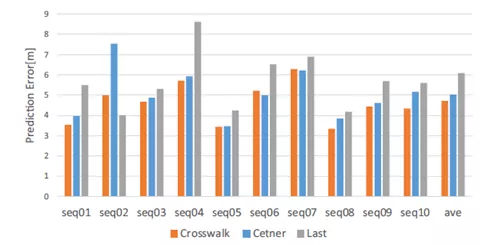 ;其中每个状态是一个纵向位置,横向位置,角度,速度,偏航率,加速度,和偏航加速度。
;其中每个状态是一个纵向位置,横向位置,角度,速度,偏航率,加速度,和偏航加速度。
;其中每个状态是一个纵向位置,横向位置,角度,速度,偏航率,加速度,和偏航加速度。EKF是卡尔曼滤波器的扩展,它估计动态系统的状态:

其中fp显示均匀加速运动模型。其中fp显示匀加速运动模型。用期望的速度vdes和期望的偏航速率γdes作为EKF的虚拟测量。期望速度vdes由方程(1)和(2)组成。如果t<tmin,则vdes等于vin(t),否则等于vout(t)。假设过程噪声wp和测量噪声vp具有正态分布。关于噪声Vγ和WP,请参阅[5]。期望速度VV中的噪声是观测到的当前速度与当前时间对应的预测过去速度之间的方差。我们将VV定义如下:

其中Vi是时间步长i之前的预测速度。在我们的实现中,Vi,N的数量被设置为10。预测时间步长的差异通过乘以10 / i来归一化。最小值和最大值是通过实验获得的常数值,分别设置为1.0和15.0
V.实验
本节介绍了对日本神奈川交叉口实际数据进行预测评估的一些结果。数据集来自10个不同的交叉口,由65辆左转车辆组成。交通参与者的地面真实位置是从点云数据手工教授的。观察到的一些交通情况中,有行人在人行横道上横过。我们的算法没有使用行人位置,而是从点云数据中学习。

图4.并与其它方法的预测误差和速度误差进行了比较。橙色和蓝色分别显示了我们的方法的观测误差和无观测误差。
图5.速度控制点位置预测误差的比较。
A.评估预测性能
对预测精度进行了定性和定量评价。预测结果的代表性场景如图6所示。
第一列显示了从安装在实验飞行器上的照相机上拍摄的照片;
第二列显示预测的轨迹。橙色和蓝色分别表示预测结果和真实轨迹。黑点序列表示轨迹图;
第三列表示预测误差,定义为每个预测时间步的真实位置与预测位置之间的欧氏距离;
最后一列表示由期望速度(橙色)、观察到的过去速度(红色)、拟合后的过去速度(绿色)和真速度(蓝色)组成的速度图。
真速度是根据当前时间的真实位置与前一步和两步的真实位置之间的差值来计算的。从弹道结果和速度图中,我们发现预测的轨迹接近真实轨迹,考虑到观测到的过去的速度,期望的速度形成了一条光滑的曲线。预测的轨迹沿轨迹图弯曲,以期望的偏航速率。从图6(A)和(B)中我们发现,我们的方法可以从任何位置预测迹。图6(C)是一种涉及车辆和行人的互动情景。
由于期望的速度在人行横道上变得最小,当有行人时,观测到的过去的速度很低,所以预测的最小速度接近于零。另一方面,图6(D)显示了发生最严重错误的场景。造成较大误差的原因是车辆与行人的相互作用。如上所述,当行人通过人行横道时,我们的方法可以将最小速度降到接近于零的水平。然而,由于我们的方法没有使用行人信息,另一名司机发动车辆的意图是不可知的。我们认为,预测起步时间需要更多的周边信息,例如行人的位置。

图6.每行显示典型场景的结果。第一列显示摄像机图像,第二列显示轨迹结果。红色和橙色矩形分别表示自我车辆和其他车辆。橙色和蓝色轨迹分别显示预测轨迹和真轨迹。紫色圆圈显示行人。第三列为带观测误差的预测误差,第四列为由期望速度(橙色)、观察到的过去速度(红色)、拟合后的过去速度(绿色)和真速度(蓝色)组成的速度图。
其次,我们将我们的方法与其他速度模型进行了定量比较。用四种方法进行了比较:我们的方法,常加速运动模型,和之前的两项工作[5],[14]。[5]的方法是基于纵向加速度随时间常数减小到零的假设。[14]方法基于轨迹图的曲率生成所需的速度模型。为了使两种方法进行公平的比较,除了速度模型外,其它方法的实现都是相同的。图4示出了预测误差和速度误差的平均值,达到了4.0秒。我们发现,该方法的预测误差和速度误差最小。本文提出的常加速运动模型和[5]提出的方法不能再现速度的变化,如减速和加速。文[14]提出的方法可以再现速度的变化,但该方法只考虑了曲率,表现得不够。
另外,我们只对预测部分的精度进行了评估。上述预测误差包括由于车辆检测和跟踪而产生的观测误差。利用当前时间的真实位置作为预测算法的输入,重新计算预测误差和速度误差。每个错误都在图4(蓝线)中绘制。4.0s预测层末有无观测误差的平均预报误差分别为4.7m和4.3m。
B.评估速度控制点的位置
在我们的方法中,速度控制点被设置为最接近人行横道的路径点,因为在车辆通过人行横道之前,速度被认为是最小的。在这一部分中,我们定量地描述了速度控制点是最佳位置的位置。以速度控制点的三个位置进行比较,一个是最近的人行横道,另一个是范围的中心,包括曲率等于或超过阈值的路径点,第三个是上述范围的最后一点。
图5显示了速度控制点的每个位置和数据集的每个序列的预测误差的平均值。最右边的图表示所有序列的平均值,并表明速度控制点的最佳位置是最接近人行横道的路径点。当行人不存在时(seq 6,7),在速度控制点设置到中心的情况下,精度略高。另一方面,当行人存在时,速度控制点最接近人行横道的情况下,速度控制点的精度较高。根据行人是否存在,可以改变速度控制点的位置。然而,在速度控制点设置到人行横道的情况下,电动汽车的安全性更高,因为有时由于其他车辆的障碍物而无法检测到行人。
Ⅵ结论
本文提出了一种城市交叉路口转弯车辆轨迹预测方法。该方法提出了一种新的轨道预测速度模型,该模型考虑了所观察到的速度和交叉口几何形状,如交叉角、拐角半径、人行道的横向距离和人行横道的位置等。我们的方法的优点是能够预测在任何交点和任何位置的轨迹,我们的方法比其他预测方法具有更好的预测性能。
在今后的工作中,我们需要解决的问题是,当车辆和行人之间发生相互作用时,预测误差会变大。我们将根据车辆和行人的多重状态,改进产生期望速度的方法。
REFERENCES
[1] A. Wolfermann, W. K. Alhajyaseen, andH. Nakamura, Modeling speed profiles of turning vehicles at signalized intersections.International Conference on Road Safety and Simulation (RSS2011), 17 pp, 2011.
[2] S. Lefevre, D. Vasquez, and C. Laugier,A survey on motion prediction and risk assessment for intellgient vehicles,ROBOMECH Journal, vol. 1, no. 1, pp. 1-14, 2014.
[3] A. Houenou, P. Bonnifait, V. Cherfaoui,and W. Yao, Vehicle trajectory prediction based on motion model and maneuverrecognition, IEEE/RSJ International Conference on Intelligent Robots andSystems (IROS2013), pp. 4363-4369, 2013.
[4] J. H. Kim and D. S. Kum, Threatprediction algorithm based on local path candidates and surrounding vehicletrajectory predictions for automated driving vehicles, IEEE InternationalConference on Intelligent Vehicles Symposium (IV2015), pp. 1220-1225, 2015.
[5] B. Kim, and K. Yi, Probabilistic andholistic prediction of vehicle states using sensor fusion for application tointegrated vehicle safety systems, IEEE Transactions on IntelligentTransportation Systems, vol. 15, pp. 2178-2190, 2014.
[6] D. Petrich, T. Dang, D. Kasper, G. Breuel,and C. Stiller, Mapbased long term motion prediction for vehicles in trafficenvironments, IEEE International Conference on Intelligent TransportationSystems (ITSC2013), pp. 2166-2172, 2013.
[7] J. Wiest, M. Hoffken, U. Krebel, and K.Dietmayer, Probabilistic trajectory prediction with gaussian mixture models,IEEE International Conference on Intelligent Vehicles Symposium (IV2012), pp.141-146, 2012.
[8] M. Schreier, V. Willert, and J. Adamy,An Integrated Approach to Maneuver-based Trajectory Prediction and CriticalityAssessment in Arbitrary Road Environments, IEEE Transactions on Intelligent TransportationSystems, vol. 17, pp. 2751-2766, 2016.
[9] Q. Tran and J. Firl, Modelling oftraffic situations at urban intersections with probabilistic non-parametricregression, IEEE International Conference on Intelligent Vehicles Symposium(IV2013), pp. 334-339, 2013.
[10] T. Gindele, S. Brechtel, and R. Dillmann,R, Learning driver behavior models from traffic observations for decisionmaking and planning, IEEE Intelligent Transportation Systems Magazine, vol, 7,pp. 69-79, 2015.
[11] M. Brand, N. Oliver, and A. Pentland,Coupled hidden Markov models for complex action recognition, IEEE InternationalConference on Computer Vision and Pattern Recognition(CVPR1997), pp. 994-999, 1997.
[12] S. Hoermann, M. Bach, and KlausDietmayer, Dynamic Occupancy Grid Prediction for Urban Autonomous Driving: ADeep Learning Approach with Fully Automatic Labeling, arXiv preprint arXiv:1705.08781,2017.
[13] B. Kim, C. M. Kang, S. Lee, H. Chae,J. Kim, C. C. Chung, and J. W. Choi, Probabilistic Vehicle TrajectoryPrediction over Occupancy Grid Map via Recurrent Neural Network, arXiv preprintarXiv:1704.07049, 2017.
[14] M. Liebner, F. Klanner, M. Baumann, C.Ruhhammer, and C. Stiller, Velocity-based driver intent inference at urbanintersections in the presence of preceding vehicles, IEEE IntelligentTransportation Systems Magazine, vol. 5, pp. 10-21, 2013.
[15] T. D. Vu and O. Aycard, Laser-baseddetection and tracking moving objects using data-driven markov chain montecarlo, IEEE International Conference on Robotics and Automation(ICRA2009), pp.3800-3806, 2009
作者情况:
1Atsushi Kawasaki is with the Corporate R&D Center, Toshiba Corporation, Japan. atsushi1.kawasaki@toshiba.co.jp
2Tsuyoshi Tasaki was with the Corporate R&D Center, Toshiba Corporation, Japan. He is now with Meijo University, Japan. tasaki@meijo-u.ac.jp





最新资讯
-
推荐性国家标准《乘/商用车电子机械制动卡
2025-04-30 11:13
-
载荷分解
2025-04-30 10:46
-
布雷博在上海开设亚洲首个灵感实验室
2025-04-30 10:25
-
组分性能对锂离子电池卷芯挤压力学响应的影
2025-04-30 09:00
-
美国发布自动驾驶新框架,放宽报告要求+扩
2025-04-30 08:59
