




 广告
广告





























































现在很多主流汽车都安装了高级驾驶员辅助系统(ADAS),而测试该系统需要特殊的设备和能力,通常包括有控制汽车之间相对位置的能力。伴随EuroNCAP(欧盟新车安全评鉴协会)和NHTSA(美国国家公路交通安全管理局)优先推荐配备这个技术来警示驾驶员即将发生的碰撞,我们的机器人已经在全世界范围内被普遍采用,并作为ADAS测试的首要选择。
ADAS测试常见要求:
1. 能以厘米级精度沿着预定路径行驶?
2. 精确地控制车辆速度,让其按照设定的速度曲线行驶?
3. 能以一个固定的减速度制动?
4. 精确控制2辆车之间X、Y方向的相对距离?
5. 能实现当多个条件满足时触发一个特定事件?
ABD解决方案:
1、路径跟随----机器人系统的路径跟随功能可以引导车辆在高达220km/h的速度下以2cm的控制精度沿着预定的路径行驶。
2、车辆速度控制----提供一系列踏板机器人用于精确控制车辆的速度,速度控制误差小于0.5km/h(取决于PID调校好坏)。
3、精确制动-----使用制动机器人或者CBAR,可以实现自动紧急制动(AEB)和前碰撞预警(FCW)测试要求的稳定精确的制动输入。有一系列控制模式可用,包括踏板行程、踏板力和车辆减速度控制。
4、车与车之间的相对位置控制----对于很多类型的ADAS开发测试来说,多于1辆车的精确同步是关键。我们提供很多车辆同步的方案:(1)纵向距离控制:VBOX ADAS或RT Range;(2)同时实现横向及纵向距离控制:Sync mode。
5、可设置的触发条件----例如当1个或2个触发条件同时满足时,或者当触发条件到达并保持一段时间后开始执行预设的事件。
可完成的ADAS测试:
◆ AEB测试----EuroNCAP规程 ;
◆ FCW前碰撞预警;
◆ 交叉路口碰撞预警;
◆ 安全带张紧----追尾事故引起;
◆ NHTSA制动测试规程;
◆ 自动泊车系统测试;
◆ 行人安全;
◆ 变道辅助决策系统---ISO1738;
◆ ACC自适应巡航控制----Cut in/Pull out test—ISO15622;
◆ AEB测试—C-NCAP规程;
◆ LDW车道偏离预警---ISO17361和NCAP;
◆ LKA、LSS车道保持系统测试;
◆ BSD盲点检测系统测试;
◆ AES自动紧急转向系统测试。
我们还提供一系列能够与机器人或者人工驾驶车辆同步的可控制软目标系统,以减少在进行ADAS测试时对测试车辆造成损坏的风险。
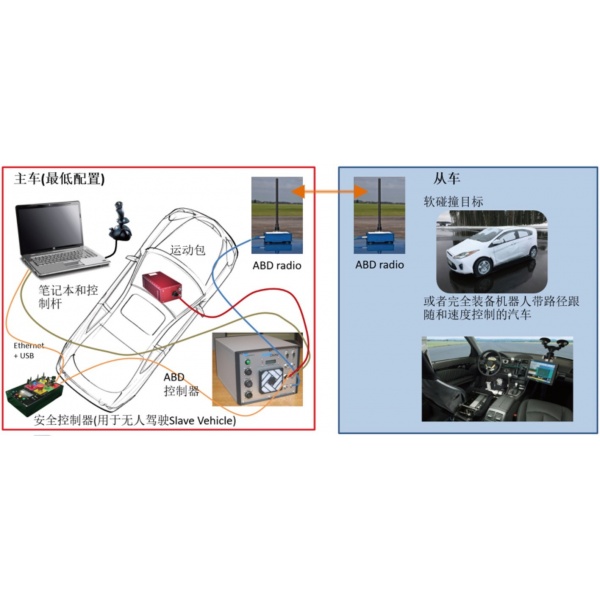
ADAS测试需要的最少配置:
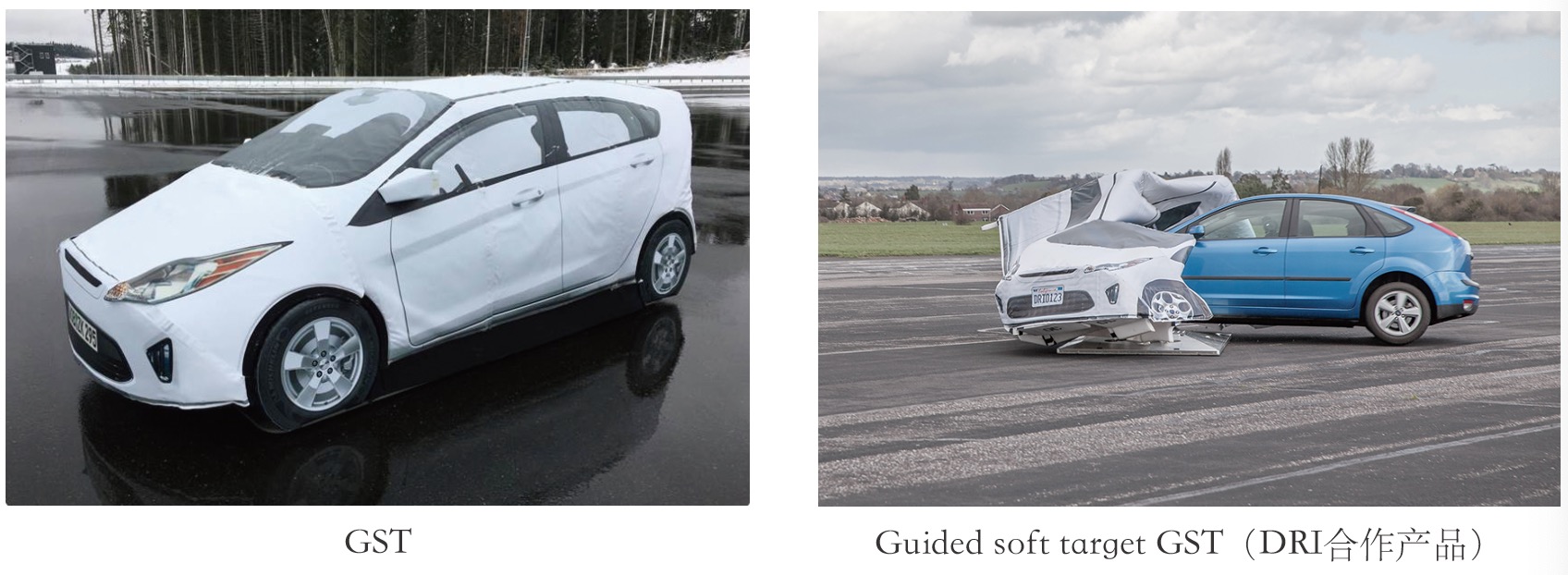
GST(引导软目标车)
Mk2 引导软目标车 ( GST ) 设计用于车辆高级驾驶辅助系统 ( ADAS ) 测试的新一代平台。Mk2 GST 具有第一代 GST 设计的所有先进功能,同时又具有极低的 100mm 的高度。该引导软目标车是我们和动力研究有限公司 ( DRI ) 的合作产品。该产品融合了 DRI 的碾压平台概念和 我们的领先路径跟随及同步控制技术。
引导软目标车(GST)的设计使得高速碰撞可以在不对试验车造成重大损坏的情况下实现。它由一个外廓很低的底盘(LPC,车辆可以从上面辗压过去)和一个可分离的泡沫面板车身(the Soft Car 360harmonized Global Vehicle Target,GVT)组成。当测试车辆从这个低外廓的车辆上辗压过去时,车轮会缩进到底架中来保护 GST 的悬架,并使试验车的悬架受到的可能冲击最小化。

Guided Soft TargetTM 120 (GST 120TM)
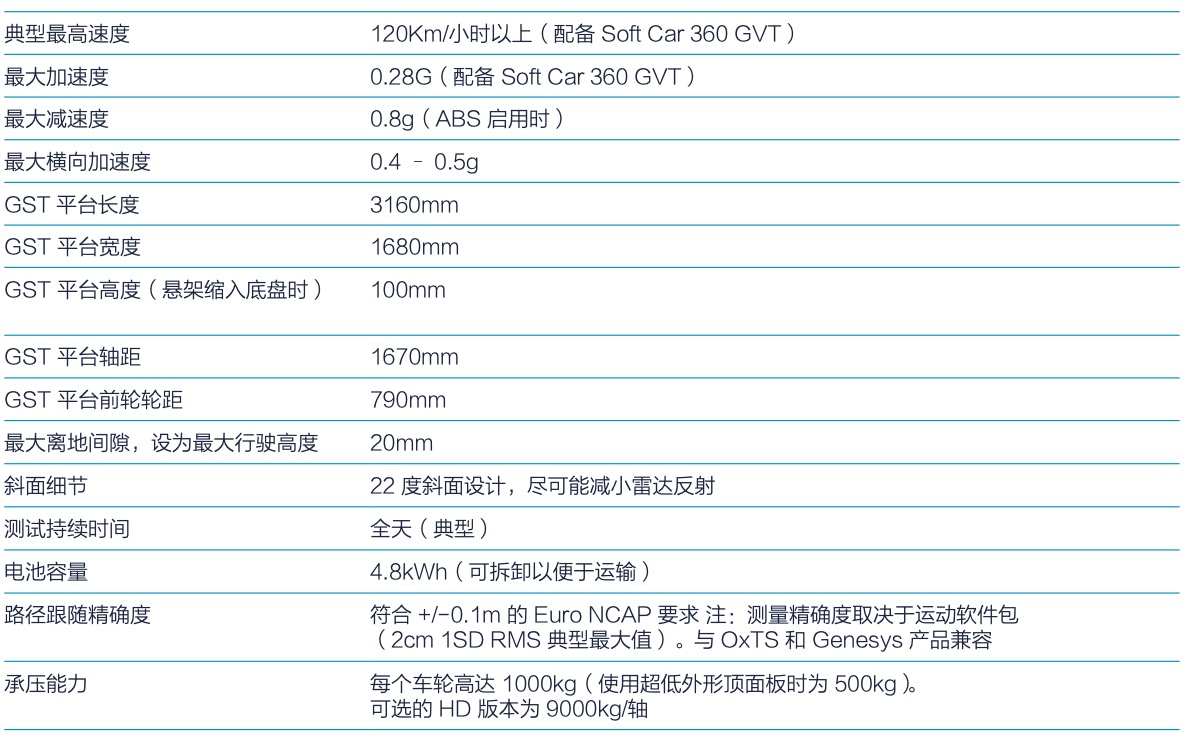
GST 120 是目前可用于测试汽车高级驾驶辅助系统 (ADAS) 的最强大的目标车辆系统。GST 120 的最高速度可达到120km/小时,是市场上唯一能够在现实高速路上对高速公路辅助系统和自动驾驶系统进行测试的产品。
GST 120 与 AB Dynamics 最初的 GST 设计有着诸多相同的领先特点,并被广泛用于 Euro NCAP 测试。得益于仅 100mm 的高度,它能够以高达 120km/小时的速度运行, 并搭载了同类领先的 4.8kWh 电池。
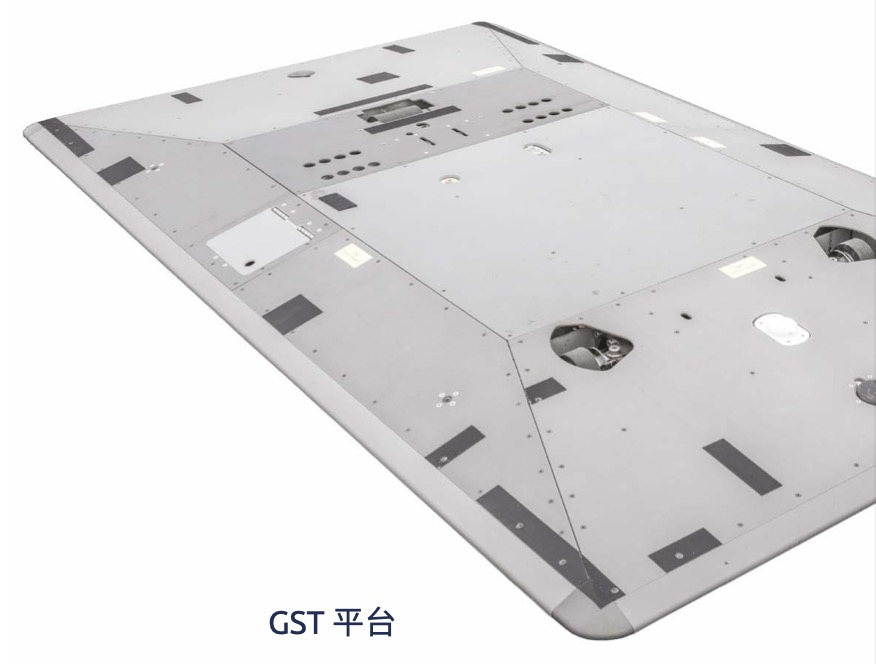

GST 120 可以在不对测试车辆造成严重损坏的情况下进行高速碰撞试验。它由一个可以从上面驶过的 GST 平台以及一个单独的泡沫板车身(Soft Car 360 协调标准的全球车辆目标,即 GVT)组成。当车辆驶过平台时,车轮会缩回底 盘内,以保护平台的悬架,并对测试车辆的悬架产生尽可能少的冲击输入。
通过使用带有车载电池的电动机来推动车辆,GST平台的控制系统可以准确地引导车辆以规定的速度沿着预先编程的路线行驶。用来为系统供电的电池将为典型的一天测试提供充足的电力,而在测试的间隙,它们也可以连接到合适的电源轻松进行充电。
控制器会使用高精度 GPS 校正的惯性导航系统提供的位置反馈,以便实现精确的路径跟控制。GPS 装置提供的时间信号会被用来确保精确的毫秒级同步,而这正是进行精确和可重复的碰撞以及近距离通过场景下所必不可少的。
GST 可通过 AB Dynamics 标准无人驾驶测试系统所使用的相同远程基站的无线电来控制。通过使用与 AB Dynamics 的机器人相同的系统,GST 可以与其他车辆同时使用,以创建复杂的多车测试场景。AB Dynamics 成熟的路径跟随和同步控制技术使得 GST 120 能够与 AB Dynamics 现有的所有赛道测试产品无缝集成。
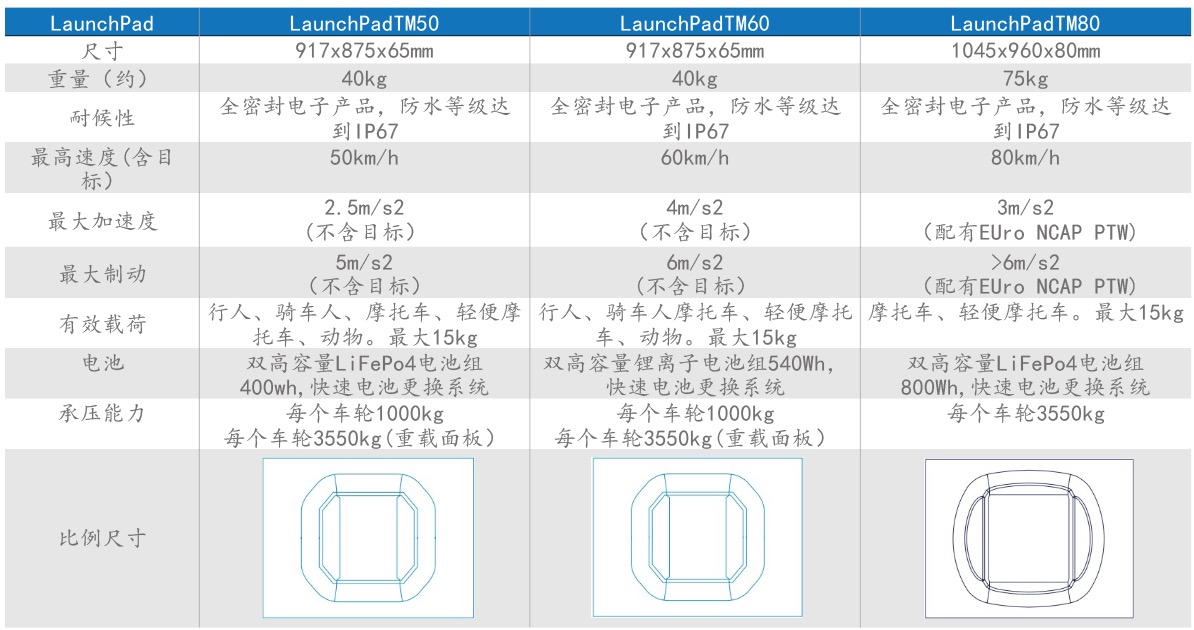
LaunchPad
LaunchPad 是一款设计用于搭载道路弱势使用者(VRU)软目标的紧凑型动力平台,适用于车辆ADAS开发和测试。它具备50km/h的最高速度和完整的路径跟随能力,适用于行人、自行车和两轮摩托车模型。并兼容同步系统和同步模式,可实现与测试车辆或其他的ADAS测试目标的同步测试。

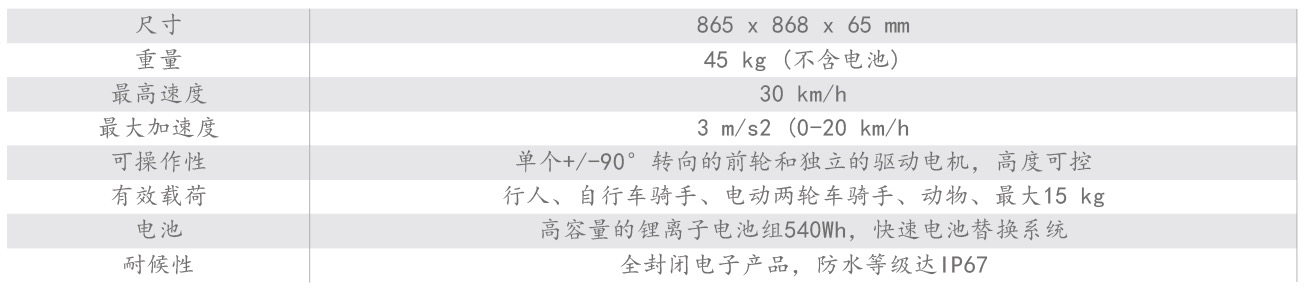
LaunchPadTM Spin
LaunchPad Spin是一款ADAS目标平台,它将VRU测试的可操作性水平提升到新的高度。其就地转弯、单轮转向的能力,使其能够在瞬间旋转360度,因此您的测试可以高度复现现实世界中行人常见的快速变化方向的行为。此外,它的最高速度为30公里/小时,也使其能够测试自行车骑手和电动两轮车骑手相关的场景。
LaunchPad Spin是重要工具,使您的开发计划能够从ADAS功能基本法规测试跃升到自动驾驶系统所需的复杂感知和分类。


技术规格

LaunchPad Spin 是专门为满足城市测试环境的要求而设计的。
• 用全方位转动的平台升级传统的皮带驱动系统,轻松满足UNECE测试程序。
• 通过在具有挑战性的城市场景中纳入VRU目标,加入重型商用车安全的前沿阵营。
• 领先于欧洲NCAP 2030年发展趋势中的预期测试,包括电动两轮车。
Soft pedestrain target(软碰撞行人目标)
从 2016 年起,EuronCAP 测试将包含由假人代替真正行人的自动紧急制动 ( AEB ) 试验。这种试验需要使用可与测试车辆同步的可控制行人模型。我们的软碰撞行人目标 ( SPT ) 使用水平皮带推进系统,因而不需要高空门架 ( 根据 EuronCAP 的观察,门架会影响测试结果 ) 。这也使软碰撞行人目标成为在任何测试跑道上都能快速安装的便携系统。
软碰撞行人目标使用标准的转向机器人电机和控制器作为驱动单元,用容易使用的RC软件来设定软碰撞行人目标,方便现有的机器人用户熟悉运用。用户可以使用他们现有的转向机器人(SR60或者SR60Torus)来减少行人系统的费用,转向机器人可以简单快速地在行人系统上安装和拆卸。另外,还有一款带有内置专用电机的可供选择。

Soft Pedestrian 360™
作为新一代的铰接式替代行人目标,DRI 的 Soft Pedestrian 360™ 让 VRU 测试达到了全新的真实性水平。
包括上半身关节在内的精密铰接方式可实现自然运动,并且能够使步态与平台速度同步,从而让加速和减速比以往任何时候都更加逼真。Soft Pedestrian 360 的逼真步态甚至延伸到了跑步,它实际上看起来更像跑步,而不是简单的快走。
Soft Pedestrian 360 由 DRI 推出了标志性 Soft Car 360™ 的同一团队开 发,是与世界领先的 OEM 和美国国家公路交通安全管理局 (NHTSA) 合作多年的实测经验的结晶。


技术规格
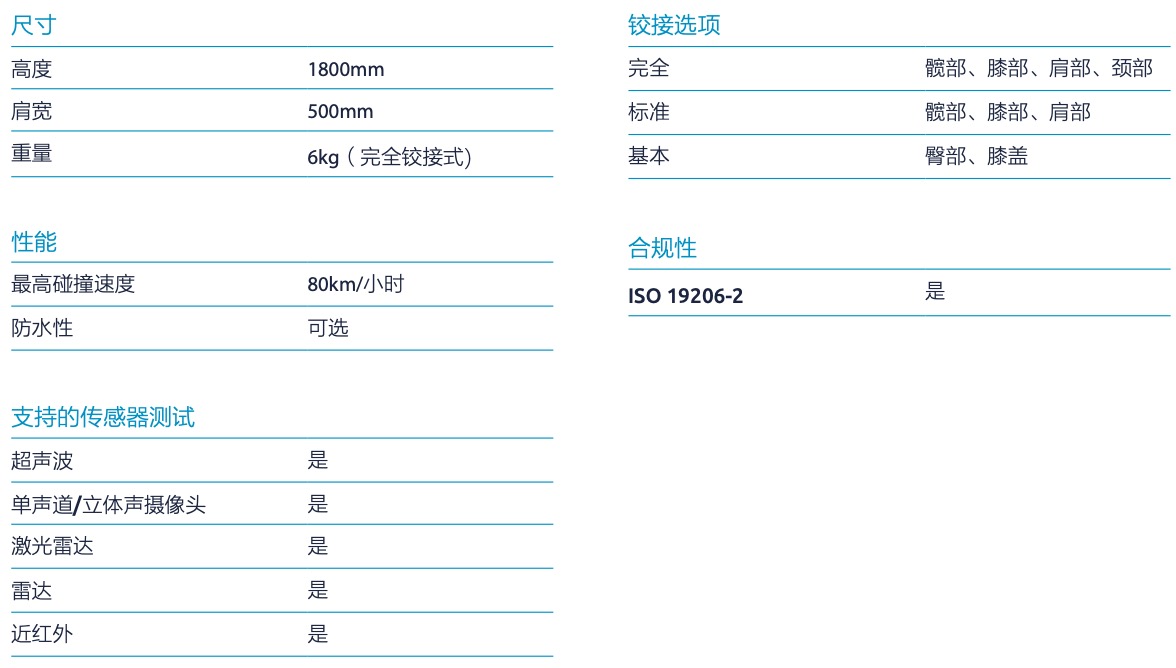



Soft Motorcycle 360™
DRI 的 Soft Motorcycle 360 是一款耐用而逼真的替代摩托车目标,在速度高达 80km/小时的情况下也能保持稳定。 其旋转的车轮和逼真的形状意味着它可以被车辆传感器系统 准确地识别出来,包括摄像头、雷达和激光雷达。
耐用性是 Soft Motorcycle 360 设计的关键,其轻盈的泡沫 结构可将车辆和目标损坏的可能性降至最低。此外,由于它的模块化设计,即使零件受损,也可以轻松快速地进行更换。
Soft Motorcycle 360 由 DRI 推出了标志性 Soft Car 360™ 的同一团队开发,是与世界领先的 OEM 和美国国家公路交通安全管理局 (NHTSA) 合作多年的实测经验的结晶。



技术规格

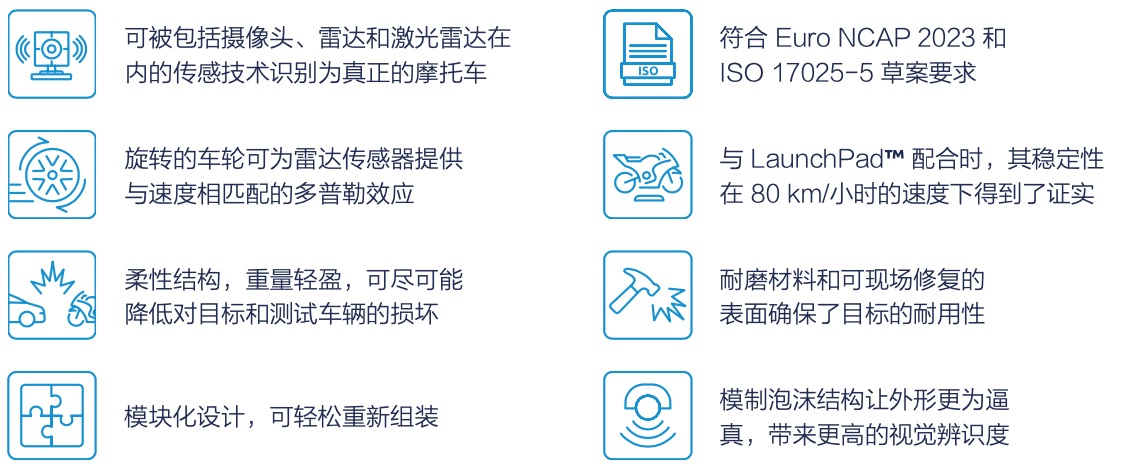
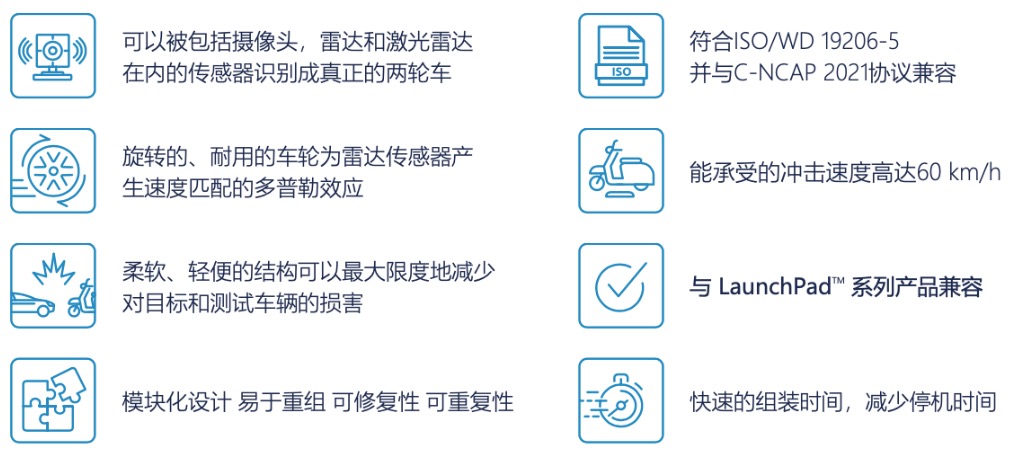
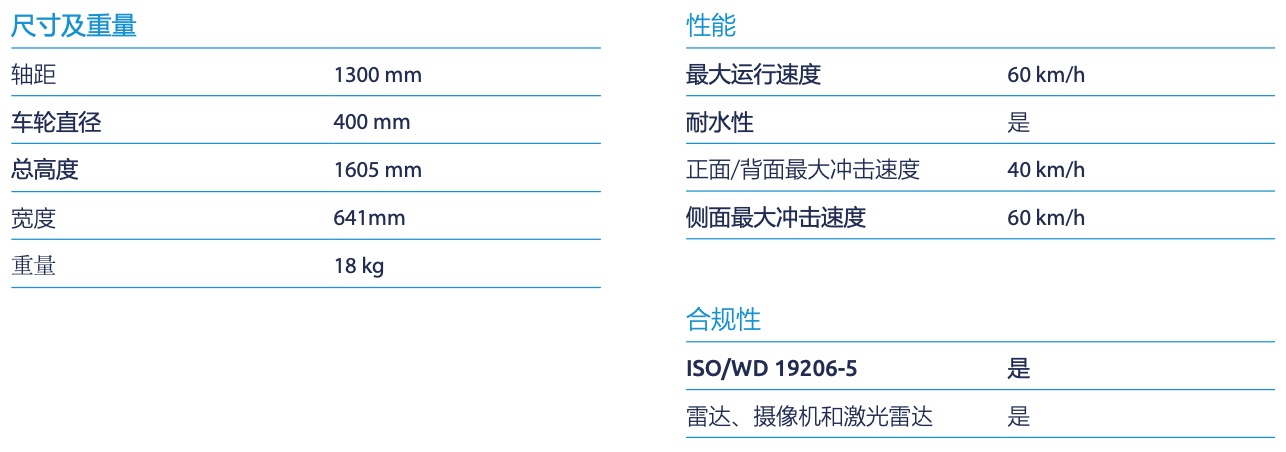
Soft Scooter 360™
360软两轮车是一款高度逼真、经济的替代两轮车目标,它的稳定速度可达60 km/h。逼真的外形、车轮旋转速率与车速相匹配、质感真实的乙烯基皮肤,这些都增加了车辆传感器系统(包括摄像头、雷达和激光雷达)对它的识别和检测。
360软两轮车设计的关键是着重于减少对测试车辆的损害。为实现这一目标,目标车的构架周围护有管状的轻质泡沫,硬点被最小化。骑手和滑板车独立分离,减少了潜在的损害。
为了帮助提高您的测试流程的可重复性,360软两轮车采用模块化设计,这意味着零部件易更换,每个单元亦配有一个单独的 备件套件,以减少停机时间。

技术规格
Soft Car 360™
Soft Car 360 假车是一款重量轻且耐用的假车目标,和 ABD 的 GST 无人驾驶平台组合使用时是 ADAS 测试的完成方案;经过实际测试和使用认证可以用于 LSS 测试,这个测试要求车辆的接近相对速度高达 144kph, 并且不会对测试车辆造成损坏, Soft Car 360 假车已得到 Euro NCAP 2020 ADAS 测试标准的采纳和认证作为唯一满足要求的 Global Vehicle Target (GVT) 使用。
G 版本的 Soft Car 360 假车的雷达反射面积得到了改良,完全达到 360 度接近都满足标准的要求;客户旧版的 F 版本车身可以用较低的成本升级到 G 版本。车身的每一部件都可单独购买当作备件使用。

特征
• 被 Euro NCAP 2020 测试标准认证
• 空气动力学特性稳定,可用于高速测试
• 具备执行像 LSS 等 ADAS 测试的能力,车辆接近速度高达 144kph
• 每一块 Soft Car 360 假车部件都可以单独作为备件
• F 版本的车身可以简单升级到 G 版本假车
• 少于8分钟的组装时间
• 泡沫车身结构,由 VelcroTM 魔术贴固定
• 外形逼真的乙烯基外衣
• 安装在车顶的可以撞开的 radio 和 GPS 天线
• 改良的逼真的雷达反射特性,前后保险杠,车门和发动机盖都有雷达反射材料
• 带反光特性的打印车灯和车牌
• 有雷达吸波功能的底裙
• 所有的泡沫车轮都内置有金属三角锥
• 外形逼真的可拆装后视镜

GTC Remote™

GTC Remote 是一款高度便携的手持设备,可用于 简化任何 AB Dynamics 移动 ADAS 平台(包括新型 LaunchPadTM Spin)的操作。
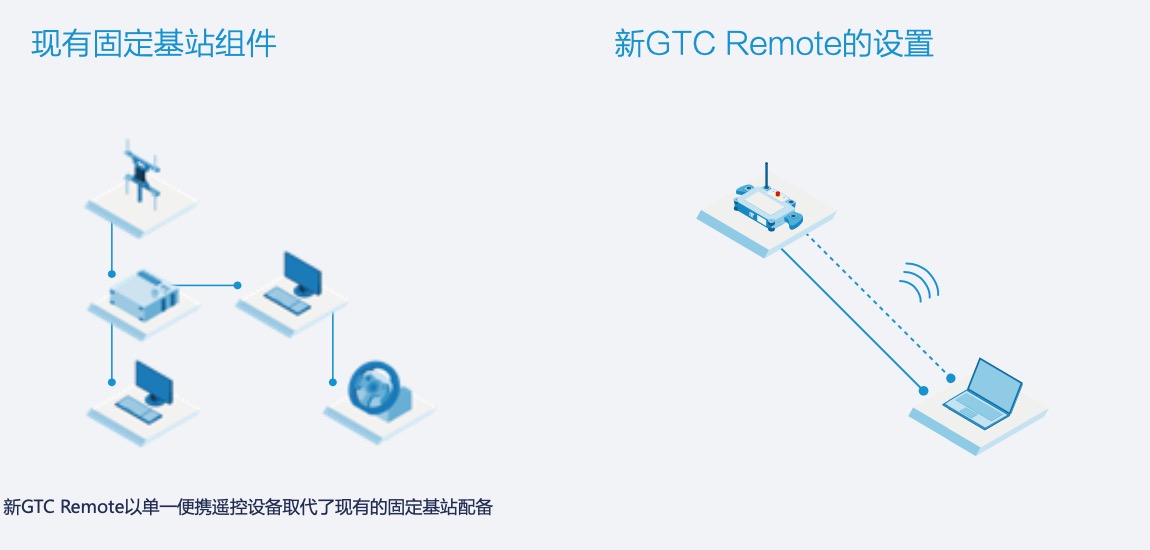
GTC Remote 将行业领先的安全性与最新的 GTC 无人驾驶软件 相结合,在便携式设备中集成了典型静态基站设置的各个组件, 包括车辆控制输入设备、无线电和安全控制器。 对于只需要单一测试平台的行人和骑行者ADAS 测试,GTC Remote 是您的理想选择,不再需要多个硬件组件,简化了软件 工作流程,能够更快地完成设置,节省下来更多的时间用于场地 测试。
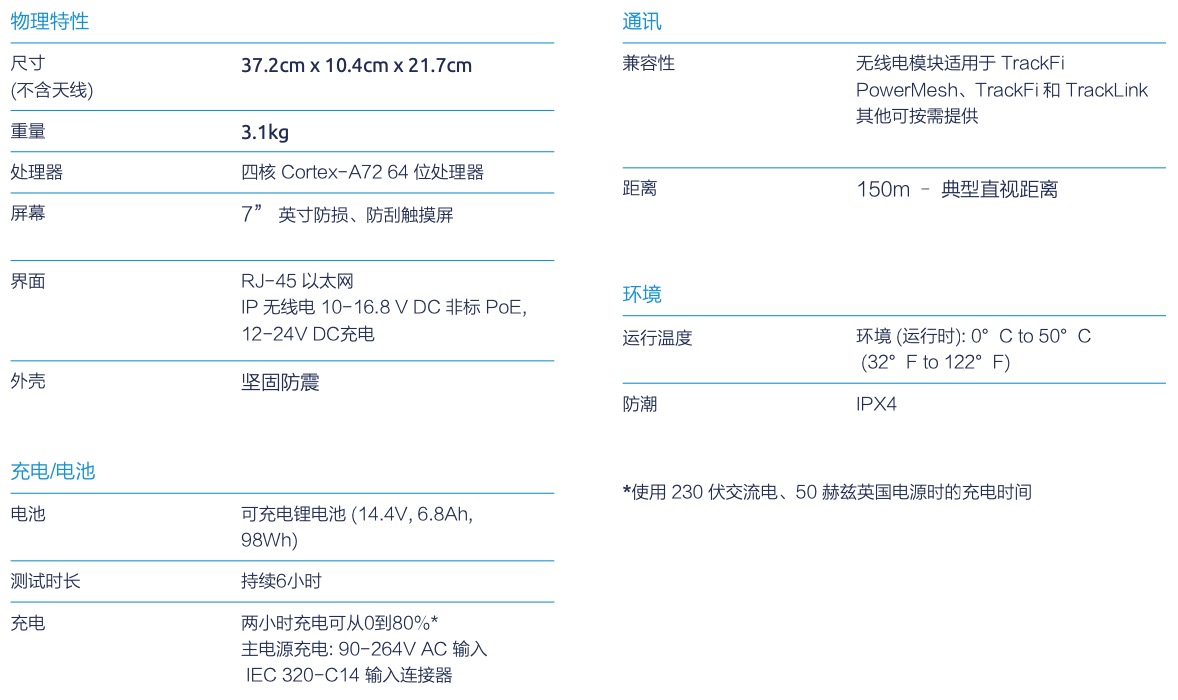
技术规格
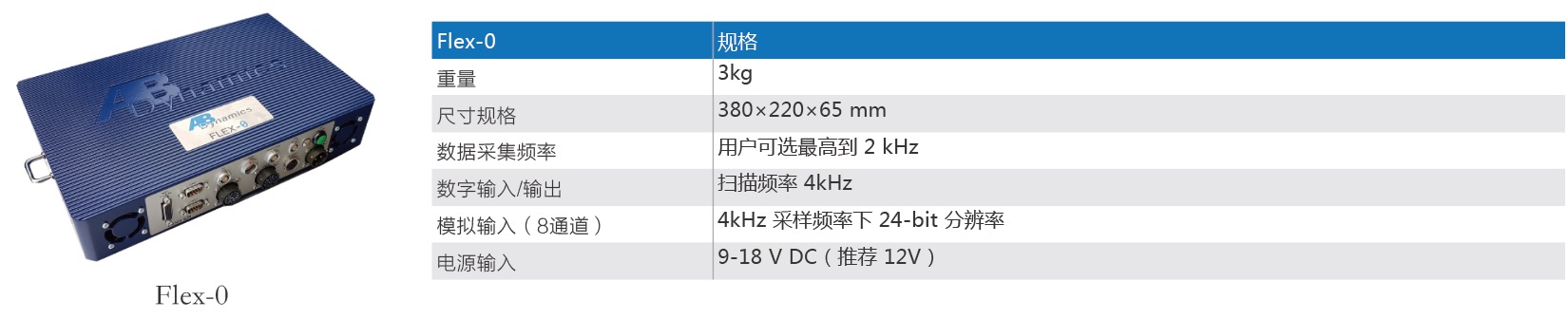
Flex-0
Flex-0 提供了通过 CAN 或者线控的方式来控制车辆本身的执行器的紧凑式方案。Flex-0 采用软件套件可以用来完成多种标准测试,而不需要在车辆安装驾驶机器人,并能实现路径跟随和同步。控制器通过 CAN 协议与车辆进行通讯,这种控制接口只有通过我们和原始设备供应商 ( OEM ) 之间的合作才能实现。我们提供了客户可以转换成车辆可识别格式的标准 CAN 控制协议。甚至,我们可以为客户量身定制控制协议。 Flex-0 也可用在无人驾驶测试系统 ( DTS ) 中,使得测试能够在车辆无驾驶员的情况下进行。
Capture+Review
Capture+Review 为车辆测试提供一个视频集成采集方案。能记录多达四路摄像头或电脑集成摄像头的视频,并能与我们的驾驶机器人的数据通道叠加在一起。视频能被同步嵌入记录的数据里,不需要使用者后续同步处理。
当回放试验数据曲线图时,试验视频能够与数据一起同步回放。
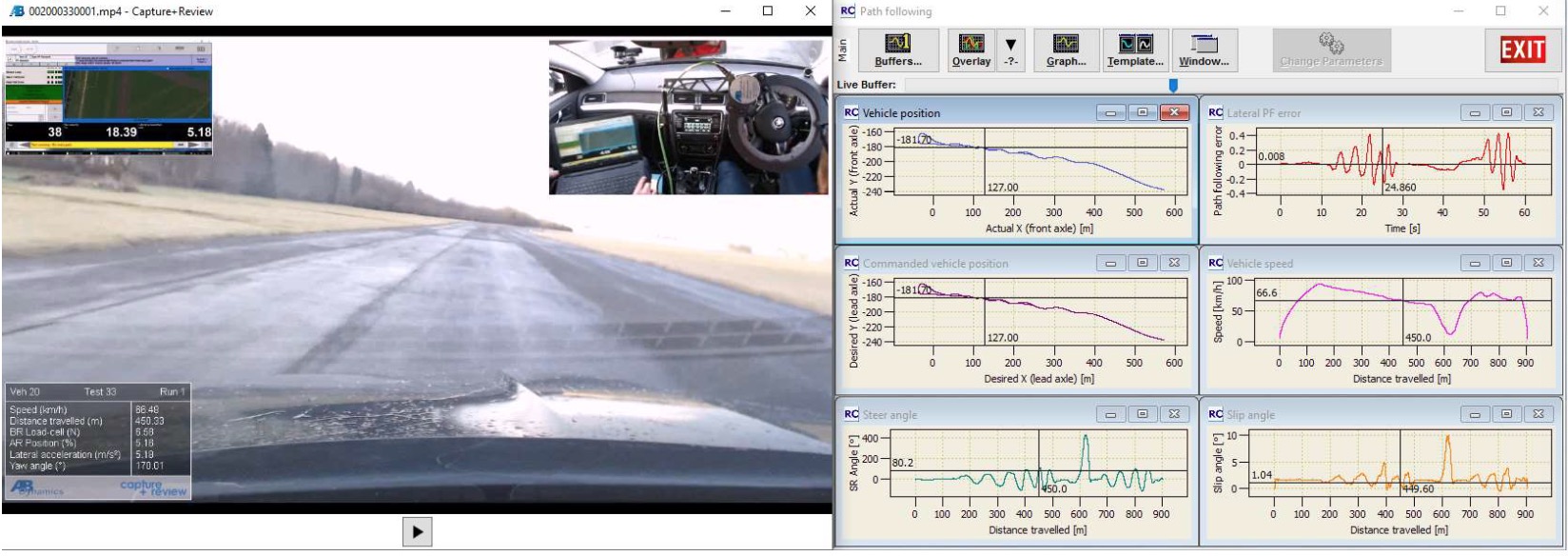
Capture+Review 是一个由 USB 摄像头和软件模块组成的系统,可用于所有的机器人控制器。系统标配两个高清 (1080p) USB 网络摄像头以及可用于车内安装的固定夹具。
总览
1、可和所有机器人控制器一起使用;
2、可自定义视频的叠加,最多接收四路信号源(独立摄像头或电脑集成摄像头);
3、允许用户将选择的数据通道和视频同步叠加;
4、辅助车辆或 ADAS 性能的精确评估;
5、为车辆测试提供完美的视频和数据依据。

