




 广告
广告






























































系统概述
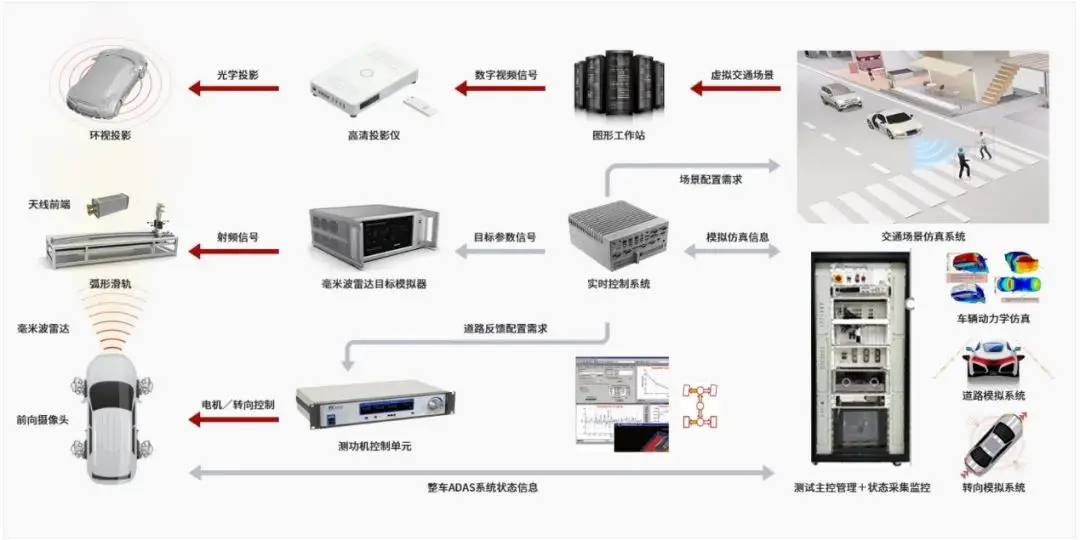
系统是一种应用室内环境中,模拟仿真复杂交通场景环境下针对智能驾驶系统产品的全自动测试系统平台。系统设备基于视觉模拟及毫米波雷达模拟设备,构建系统级仿真测试环境,辅助被测车辆实现整车级77GHz频段(76~78GHz)和79GHz频段(77~81 GHz)的车载毫米波雷达系统的ADAS工况模拟及测试,可以实现虚拟场景中前向碰撞预警。
系统图片
系统组成
由多个传感器及环境模拟系统构成:
● 目标模拟系统
● 毫米波雷达目标测试系统
● 目标角度模拟
● 轴耦合式测功系统
● 实时模拟控制系统
系统具备ADAS测试场景的仿真及场景构建功能,可以基于ADAS法规对场景进行自定义构建,构建完成的场景可以通过目标角度模拟系统和投影显示系统进行目标模拟,系统中的被测ADAS系统可以基于系统构建的虚拟场景目标,使系统传感器获取环境场景中的目标数据,目标数据经过ADAS系统处理后,ADAS系统进行决策,从而实现ADAS测试。
系统特点
系统将智能驾驶测试由传统的外场跑车试验转入内场试验室测试,提高试验效率,降低试验成本,并对指标进行准确量化,可直观的验证ADAS的性能。
系统原理
通过对各种传感器目标、V2X通信环境和数据,以及导航定位环境及数据的模拟,实现整车级智能驾驶产品的功能及性能测试。
系统功能
● 视觉目标模拟系统+雷达目标模拟系统+路面环境模拟系统,构建复杂交通场景下,整车在环模拟仿真自动测试系统平台,实现智能驾驶系统的整车级规范化、标准化功能和性能测试
● 测试范围:自动驾驶系统、高级辅助驾驶系统
● 测试功能
-- 智驾功能测试:FCW、AEB、ACC、LDW、LCA、LCK、LKA、BSD、BCW、TSR、APA等功能测试
-- 智驾性能测试:传感器融合性能测试、TTC时间测试、CIPV识别跟踪测试、抗环境干扰能力测试、长期信赖性测试、不良问题再现及对策效果测试
● 被测件尺寸
-- 可覆盖乘用车及商用车(<4.5t)
● 测件特点
--支持多种类传感器模拟仿真,视觉、毫米波雷达、激光雷达、V2X、GNSS等
|
FCW |
车辆前向撞击报警 |
Forward Collision Warning |
|
AEB |
自动紧急制动 |
Auto Emergency Brake |
|
ACC |
自适应巡航控制 |
Adaptive Cruise Control |
|
LDW |
车道偏离警告 |
Lane Departure Warning |
|
LCA |
并线辅助系统 |
Lane Changing Assist |
|
LCK |
车道居中控制 |
Lane Center Keep |
|
LKA |
车道保持辅助 |
Lane-Keeping Assistance |
|
BSD |
盲点检测系统 |
Blind Spot Detection |
|
BCW |
盲点碰撞预警 |
Blind Collision Warning |
|
TSR |
交通标志识别 |
Traffic Sign Recognition |
|
APA |
自动泊车辅助 |
Auto Parking Assistant |
支持多种第三方模拟仿真软件,51 Sim-One、 PreScan、VTD等
支持自动化无人测试,自动完成全部测试项并判定结果;
系统指标
应用场景
