-

简介:ABD测试系统历史,从2008年开始,ABD整合了一系列已有的转向机器人,制动踏板机器人,油门踏板机器人,离合、换档机器人及路径跟随功能,研发了一个无人驾驶测试系统,主要应用于:车辆动态测试、ADAS高级驾驶辅...
-

简介:SP6021无人驾驶测试系统适用于DTS的机器人:SR15-SR15 Orbit-SR35-SR60-SR 60 Torus-SR150-CBAR-GR-CRABD无人驾驶测试系统包括转向机器人、制动机器人、油门踏板机器人和带离合器执行器的换挡机器人。ABD机器人自...
-

简介:ABD离合机器人控制,两种执行器可供选择设计和ABD其他踏板机器人一起使用ABD离合机器人可以为控制车辆的离合器踏板提供两种解决方案。 两者都可提供精确的伺服控制,可进行准确和可重复的位置输入。 使用离合器机...
-

简介:ABD 转向机器人系列: SR15SR15 Orbit SR35 SR60SR60 OrbitSR60 TorusSR150ABD转向机器人能够对车辆转向系统施加精确的可控制的输入激励,广泛应用于车辆测试,包括车辆瞬态操纵特性,ADAS主动安全系统测试,相关...
-

简介:ABD路径跟随系统出品的背景是,ABD转向机器人升级;同时也应用于ABD的无人驾驶测试系统ABD路径跟随系统跟随系统主要增强了驾驶机器人的能力,使机器人系统引导道路车辆在任何速度上,都有极高的准确性和重复性。...
-

简介:ABD为满足客户需要提供了一系列电驱动的ABD踏板机器人。机器人能联合起来实现多踏板的控制,并且也可与ABD的转向机器人结合起来实现车辆的全面控制。这个系列包含有一些制动机器人、一个油门机器人、一个联合制动...
-

简介:ABD换挡机器人自带离合器控制,两种执行器可供选择设计和ABD其他踏板机器人一起使用ABD换挡机器人(GR)设计用于手动档轿车和轻型货车中执行受控换档。 当与ABD的离合器机器人(CR)和油门机器人(AR)一起使用时...
-

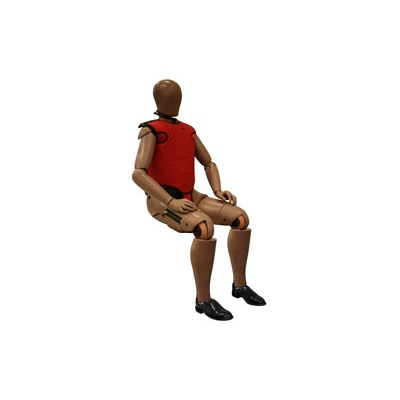
简介:ECE R16人体模型是作为一种加载装置开发的,用于在模拟碰撞情况下测试车辆安全带。假人代表一般大小和体重分布的第50百分位男性成年人。出于简单的原因,假人没有下臂且只有一个小腿,并且由半透明硬质聚氨酯制成...
-

简介:概观Hybrid II 50th Percentile Male Test Dummy最初由Alderson研究实验室设计,由通用汽车公司和美国国家公路交通安全管理局(NHTSA)使用Alderson和Sierra Engineering零件进行了修改。该假人能够生成具有足够...
-

简介:概观Hybrid III 95th Large Male Dummy目前处于D级,最初由First Technology Safety Systems(当时的Humanetics)和汽车工程师协会(SAE)生物力学小组委员会,CDC和俄亥俄州立大学开发。假人代表成年人口中最大...
-

简介:概观Hybrid III 50 Percentile Male Crash Test Dummy是世界上使用最广泛的碰撞测试假人,用于评估正面碰撞测试中的汽车安全约束系统。Hybrid III 50th设计最初由通用汽车公司开发,现由Humanetics与汽车工程师协...
-

简介:仿真模型Humanetics 在代码LS-DYNA,PAM-CRASH,ABAQUS和RADIOSS中提供高度详细且经过充分验证的有限元模型,以及有限元建模咨询服务。虚拟功能头颈部头骨和颅骨帽是一体式铸铝部件,带有可拆卸的乙烯基皮。颈部...
-
简介:自1985年以来,美国交通部的国家公路交通安全管理局(NHTSA)积极支持THOR发展计划。1995年,通用工程和系统分析(GESAC)开展了该项目并开发了第一个THOR原型,该原型结合了TOR-50M(创伤评估装置)的设计元素 -...
-

简介:多功能机器人 行程和安全都符合高标准 快速设置,节省时间和花费 可应用于环境箱中 开源软件 带有自诊断功能的端到端通讯ROACTERE 经实践最完善的机器人技术,用于环境箱和具有高度定制化的软件,用于环境箱模拟...
-

简介:误用测试的目的是探索车辆在极端情况下会发生什么情况,例如,当驶入沙丘或斜坡并腾空而起。典型的测试是确定安全气囊或其他乘客约束系统元件是否在非碰撞情况下发挥作用。驾驶车辆冲入沙丘、木梁或坡道对测试驾...
-

简介:耐久性测试单调乏味,不断重复 ,但对于机器人而言则是完美的工作旨在加速车辆部件磨损的测试通常要在粗糙表面上反复驾驶车辆。对于驾驶员而言,一些耐久性测试对身体是巨大的考验,每天只能驾驶一个小时,因此需...





 广告
广告






































